| |
 |
Dr. Sárközy Ferenc: Térinformatika
Mobil térképező rendszerek
Ebben a részben megismerkedünk
- a mobil térképező rendszerek általános felépítésével,
- az inerciális navigációs rendszerek fogalmával és működési
alapelveivel,
- Néhány megvalósult Mobil Térképező Rendszerrel.
(angol elnevezéssel Mobile Mapping
Systems vagy rövidítve MMS) a 80-as évek végén, 90-es évek
elején jelentek meg északamerikai kísérleti műhelyekben, ipari-kísérleti
alkalmazásukról az első közlemények 1995-96-ra datálhatók [17],
[18].
A rendszer mozgó
szállítóeszközre erősített különböző érzékelőkből álló együttes, mely képes a
jármű pályájának folyamatos meghatározására, s egyben a szenzorok fajtájától
függő, kiegészítő térbeli információ gyűjtésére.
Ha egyszerűbben akarunk fogalmazni, akkor arról van szó, hogy
egy furgont felszerelünk helymeghatározó műszerekkel és digitális kamarákkal és
a furgon 60 km/óra sebességgel haladva képes nem csak a saját pályáját, de a
környező utcaképet is geometriailag korrekten kiértékelhető módon rögzíteni.
Szenzorként rendszerint CCD kamarákat alkalmaznak, de
helyettük alkalmazhatnak:
- - képalkotó
lézert;
- - profilozó
lézert;
- - impulzus
radart és
- -
ultrahangos érzékelőt is.
A képalkotó lézer alkalmazása esetén a kép mellett a
szenzortól mért távolságot is meghatározzák, ami növeli a meghatározás
redundanciáját és pontosságát.
A lézer profilméréskor távolságot és szöget mérnek
(pld. vasúti űrszelvény meghatározásához).
Az impulzus radarok képesek az objektumok vastagságának
meghatározására is, rendszerint a burkolati hibák földerítésére használják.
Az ultrahangos érzékelők szintén poláris koordinátákat
(távolságokat és szögeket) határoznak meg, utak hossz,- és keresztszelvény
méréseinél kerülnek alkalmazásra.
Az érzékelők sora persze még folytatható volna (pld. az igen
gyakran alkalmazott videó-kamerákkal) felsorolásunkban azonban
csak azok szerepelnek, melyekből számítható helyzeti pontosság többé-kevésbé összhangban
van a furgon pályájának meghatározási pontosságával.
A kocsi folyamatos helymeghatározására GPS
vevőt és kiegészítő navigációs eszközökként vagy inerciális navigációs
rendszert (angolul Inertial Navigation System - rövidítve INS)
vagy kerék fordulatmérőket és pörgettyűs tájolókat
használnak. Az INS-t használó mérőkocsik adatait is kiegészíthetik pld. az
ABS blokkolásgátló rendszerek fordulatmérőivel.
A felmérés eredményét
egyelőre utó-feldolgozási üzemmódban kapják meg, a jelenlegi kutatások jelen
idejű adatszolgáltatást és az ehhez szükséges automatikus objektum kiértékelést
célozzák meg.
Az olvasóban felmerülhet a kérdés, hogy a nagyfelbontású térképészeti
műholdak megjelenése után lesz-e szükség ilyen rendszerekre. Nyugodtan
válaszolhatjuk, hogy igen, elsősorban köz-, és vasutak pályái és szerelvényei,
valamint városi utcák és utcaképek felmérésekor. Ezeknél az objektumoknál
ugyanis a felmérendő objektumok jelentős része a függőleges síkban helyezkedik
el, s ezért a közel függőleges tengelyű légi és műholdas felvételeken nem
látható.
A kocsik helymeghatározását általában GPS, és INS
segítségével hajtják végre, bár a kerekek fordulatméréséből is levezethető a
relatív helymeghatározás (angolul dead reckoning DR), ez
azonban viszonylag kevéssé megbízható, mivel függ pld. a keréknyomástól,
futófelület kopottságától, stb.
Mivel a GPS-szel nagy vonásokban már
megismerkedtünk, indokolt, hogy ha csak röviden is, fogalmat alkossunk az
inerciális rendszerekről is.
A 80-as évek elején az amerikai hadsereg számára gyártott
inerciális navigációs rendszerek néhány típusát felszabadították a polgári
használat céljaira és a geodéták hozzáláttak annak a vizsgálatához, hogy milyen
feltételek mellett használhatók e rendszerek az alappontsűrítés
automatizálására.
Bár az alkalmazásra gyakorlati feladatokban már csak azért sem
került sor, mivel a műszerek akkor még igen drágák voltak (kb. 500 000 $), az
elmélet kidolgozása igen hasznosnak bizonyult napjaink korszerűbb (kisebb,
pontosabb, olcsóbb) rendszerei alkalmazhatósága szempontjából.
Az INR alpelvét
legegyszerűbben úgy képzelhetjük el hogy létrehozunk egy háromdimenziós
koordináta rendszert, mely a Földhöz képesti kezdeti helyzetét a jármű haladása
közben nem változtatja meg, s az egyes tengelyekre szerelt gyorsulásmérők
mérési eredményeit kétszeresen integrálva megkapjuk a jármű kezdeti helyzetéhez
képest a megtett út koordináta vetületeit.
A rendszer gyakorlati megvalósításához tehát biztosítani
kell a koordináta tengelyek mozdulatlanságát ezt a feladatot giroszkópok
végzik, a tengelyekre mechanikusan gyorsulásmérőket kell szerelni,
végül számítóegységet kell a rendszerhez kapcsolni a jelek gyűjtésére és
kétszeres integrálására.
A 60-as, 70-es években kialakított rendszerekben a tengelyek
stabilizálására pörgettyűket használtak. A pörgettyű tengelye giroszkópikus
merevséggel rendelkezik azaz az inerciális koordináta rendszerhez képest
helyzetét nem változtatja.
|
|
3.119 ábra -
pörgettyűvel stabilizált
himbás tengelyrendszer
|
|
Az 3.119 ábrán egyszerűsítve bemutattuk a
korai rendszerekben alkalmazott himbás megoldások alapelvét. Az m motor gyors
forgása következtében a t tengely párhuzamos az X koordináta tengely kezdeti helyzetével
(az ábrán látható koordináta rendszert az a járműtesthez
rögzítettük).
Ha a gépkocsi elfordul a Z tengely körül úgy a b keret az
ábrán látható csapágyakban szintén elfordul a- hoz képest és a t tengely
helyzete nem változik. (A feltüntetett elrendezés kompenzálja a jármű Y tengely
szerinti elfordulását is, az X menti elfordulás kompenzálására
azonban egy újabb himbával kellett volna még kiegészíteni az ábrát).
|
Ahhoz, hogy a vázolt elrendezés céljainknak megfelelően
működjön, azaz hogy a gyorsulást a kiindulástól a végpontig azonos tengely
irányába mérje arra van szükség, hogy a b keretre mereven egy
szerelőlapot erősítsünk, melyre szintén mereven felszereljük a gyorsulás mérőt.
Mivel a navigáció hajók és repülők esetén igényli a jármű elfordulási szögeinek
ismeretét is, az a testelfordulását a b kerethez képest szögadókkal mérték.
A bemutatott leegyszerűsített vázlatból is látható, hogy a
stabilizált tengelyekkel működő berendezések igen szabatos mechanikai kialakítást igényeltek (pld. súrlódásmentes csapágyak, szögadók, stb.) és a finommechanika
viszonylag lassabb fejlődése nem tette lehetővé, hogy a fenti megoldással
pontos, olcsó és kisméretű rendszerek épülhessenek. Az újabb lehetőségeket a gyorsabban fejlődő optika és
mikroelektronika szolgáltatták.
Az új típusú analitikus rendszerek létrejöttét a strapdown
(leszíjazott = rögzített) giroszkópok felfedezése tette lehetővé. A rögzített
giroszkópnak nincs stabilizált tengelye, melyhez gyorsulásmérőt rögzíthetünk, ez a giroszkóp tulajdonképpen
nagypontosságú szögsebességmérő, mely sebességértékek idő szerinti
integrálásából meghatározható a kezdeti állapothoz viszonyított, a giroszkóp
tengelye körül végzett elfordulás.
Leggyakrabban lézer giroszkópokat alkalmaznak szögmérő
egységként, de újabban szilárdtest megoldásokkal is találkozunk. A 3.120. ábrán
felvázoltunk egy lézer giroszkópot, míg a 3.121. ábrán egy szilárdtest
giroszkópot az u.n. Murata féle girócsillagot.
|
A lézergiroszkóp alapelve azon az 1881-ben
felfedezett törvényen alapul, hogy a mozgó testből kibocsátott fény sebessége
konstans marad az inerciális vonatkozási rendszerhez képest. Ha tehát a 3.120
ábrán látható optikai gyűrű nem forog, úgy a fénynek T=L/c
időre van szüksége az L optikai hosszúságú gyűrű körbejárására,
ahol c a fény terjedési sebessége. Ha azonban a gyűrű az
óramutató járásának megfelelő irányban forog, úgy annak a fénysugárnak, mely
szintén ebben az irányban járja körbe a gyűrűt  idővel többre van szüksége a
körbejáráshoz, míg annak a fénynyalábnak, mely az óramutató járásával
ellentétesen halad a kör megtétele idővel többre van szüksége a
körbejáráshoz, míg annak a fénynyalábnak, mely az óramutató járásával
ellentétesen halad a kör megtétele  idővel kevesebbe kerül. Felírható,
hogy a két nyaláb útkülönbsége idővel kevesebbe kerül. Felírható,
hogy a két nyaláb útkülönbsége
 , ,
ahol A a fénysugarak által körbezárt terület,  az
inerciális referencia rendszerre vonatkozó szögsebesség. az
inerciális referencia rendszerre vonatkozó szögsebesség.
|
|
|
3.120 ábra - a
lézergiroszkóp vázlata
|
|
A klasszikus elv egyik viszonylag korszerű megvalósítási
formája esetében a HE-NE lézert közvetlenül a fényútba szerelik, melyet
három tükör T1,T2,T3 határol. A giroszkóp testét olyan anyagból készítik, melynek
gyakorlatilag nincs hőtágulása, az optikai út pontos beszabályozását szolgáló
elemekkel a fényút hosszát a hullámhossz n szeresére állítják,
ahol n egész szám. Mivel ez a rendszer üregrezonátorként működik
a végső leolvasás a  formában jelenik meg, melyet az interferenciasávok
vándorlásának számlálásából vezet le a detektor. formában jelenik meg, melyet az interferenciasávok
vándorlásának számlálásából vezet le a detektor.
A lézergiroszkópok korszerűbb változatai gáz helyett szilárdtest
lézert használnak, a fény utat pedig száloptikában valósítják
meg.
A Murata féle girócsillag működését az ábra
felirataival próbáltuk megmagyarázni.
Nyugalmi állapotban az alaplapot gerjesztő rezgések egyenesen terjednek a szimmetrikus
érzékelő lapok felé és így azok azonos feszültséget jeleznek. Ha - az ábrán
látható módon - a háromszöget elforgatjuk, úgy a hullámterjedés inerciális
jellege következtében, a B lapra érkezik azoknak a rezgéseknek
egy része is, melyek a C balfeléről indultak még abban a
helyzetben, amikor a C vízszintesen állt. A két érzékelőről
levett feszültségek különbségéből a szögsebesség értéke számítható.
|
|
3.121 ábra - a
Murata féle girocsillag vázlata
|
|
|
Míg a giroszkópokban a hullámterjedés inerciális
jellegét használták ki a fizikusok, addig a gyorsulás mérők a tömeg
tehetetlenségén (Newton 2. törvényén) alapulnak. A
legtöbb korszerű gyorsulásmérő az inga elvet kombinálja valamely
piezoelektromos jellemzővel. Ezek kissé részletesebb ismertetése
azonban meghaladná a fejezet kereteit.
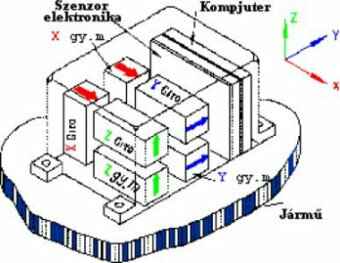
A 3.122. ábrán azt mutatjuk be, hogy hogyan is nézhet ki egy
összeszerelt inerciális rendszer, ha a ház fedelét átlátszó anyagból
készítenénk.
|
|
3.122 ábra -
járműbe szerelt INS vázlata
|
|
|
|
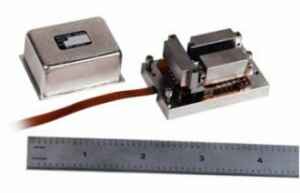
3.123 ábra - a
Litton LN-100-as rendszer gyorsulásmérő blokkja
|
|
|

|
3.124 ábra -
LN-100-as komplett inerciális rendszer
|
|
Mivel az analitikus inerciális navigációs
rendszerekben nincsenek valódi inerciális tengelyek a mérési eredményeket
számítással kell transzformálni a jármű úgy nevezett test koordináta rendszerébe, illetve a földrajzi helyi függőleges (n) koordinátarendszerbe,
melyben a pont helyzetét a  szélességgel, szélességgel, hosszúsággal
és h ellipszoid feletti magassággal határozzuk
meg. hosszúsággal
és h ellipszoid feletti magassággal határozzuk
meg.
|
A koordinátákon kívül mind a mobil térképező rendszereknek
mind a navigációs rendszereknek szükségük van még a jármű elfordulási
értékeire: a  bukásra, bukásra,  dőlésre és dőlésre és
 elfordulásra
(légi fotogrammetriában a repülőgép megfelelő elfordulás értékeiből keletkező
külső tájékozási adatokat elfordulásra
(légi fotogrammetriában a repülőgép megfelelő elfordulás értékeiből keletkező
külső tájékozási adatokat  betűkkel jelöltük) A valóban
navigációs célokat szolgáló rendszerekben ezen kívül még számítani kell a kívánt
cél eléréséhez szükséges pillanatnyi vezérlési adatokat is. betűkkel jelöltük) A valóban
navigációs célokat szolgáló rendszerekben ezen kívül még számítani kell a kívánt
cél eléréséhez szükséges pillanatnyi vezérlési adatokat is.
A
|
3.125 ábra - az
inerciális rendszer számítási blokkvázlata
|
A számítás első lépésében kalibrációs javításokkal
látják el a gyorsulásmérők és a giroszkópok outputját.
A második lépésben a test koordináta rendszerből (b)
a navigációs koordináta rendszerbe (n) transzformáló mátrix  számítására
kerül sor. Ez a számítás a következő differenciál egyenlet numerikus megoldásán
alapul: számítására
kerül sor. Ez a számítás a következő differenciál egyenlet numerikus megoldásán
alapul:
 , ,
ahol  az az
 vektorból
kialakított antimetrikus forma. Ugyanis, ha vektorból
kialakított antimetrikus forma. Ugyanis, ha  úgy úgy  , (az egyenlet baloldalán a mátrix feletti
pont a differenciálás jele). , (az egyenlet baloldalán a mátrix feletti
pont a differenciálás jele).
Az meghatározásához a navigációs rendszernek az
inerciális rendszerre vonatkozó szögsebesség vektorát  -t ki kell
vonnunk visszacsatolás formájában a mért inerciális szögsebesség vektorból -t ki kell
vonnunk visszacsatolás formájában a mért inerciális szögsebesség vektorból  -ből,
azaz -ből,
azaz
 . .
A következő számítási lépésben a test koordinátában mért erőket (egységnyi tömegen
mért gyorsulásokat) alakítja át a rendszer a navigációs koordináta rendszerbe:
 , ,
majd az átalakított értékeket betáplálja a navigációs kompjuterbe.
A nehézségi erőtér és a Föld forgásából eredő Coriolis
erő hatásainak kompenzálása után két egymást követő integrálás
eredményeképpen a rendszer kimenetén megkapjuk a vn sebességvektort
és az rn helyzetvektort. A vn vagy a szélesség és hosszúság szerinti
sebességkomponensek valamint a Föld forgássebessége  alapján alapján  meghatározható,
s ennek segítségével a már fentebb említett visszacsatoláshoz szükséges számítható. meghatározható,
s ennek segítségével a már fentebb említett visszacsatoláshoz szükséges számítható.
Mivel a mobil térképező rendszerekben az elfordulásoknak döntő
szerepe van lássunk néhány további összefüggést a mért értékek és navigációs
rendszerbe transzformáltjaik között.
Induljunk ki a test koordináta rendszer és az inerciális
koordináta rendszer közti transzformációból:  , ,
Az eddig még nem tárgyalt jelölések a következők:  az i
tengely körül j szöggel történő forgatás forgatási mátrixának
transzponáltja, az i
tengely körül j szöggel történő forgatás forgatási mátrixának
transzponáltja,  időhöz tartozó földrajzi hosszúság, időhöz tartozó földrajzi hosszúság,  a Föld
forgási sebessége. a Föld
forgási sebessége.
Érdemes megjegyezni, hogy a transzformációs mátrixok
ortogonalitása miatt igaz, hogy  , azaz a kiinduló és cél koordináta rendszert
a transzformációs mátrix sorainak és oszlopainak felcserélésével
megfordíthatjuk. , azaz a kiinduló és cél koordináta rendszert
a transzformációs mátrix sorainak és oszlopainak felcserélésével
megfordíthatjuk.
Ha differenciáljuk a kiinduló transzformációt a következő
kifejezésekre jutunk:
 . .
Végül felírhatjuk, hogy mivel is egyenlő a giroszkópok által szolgáltatott
mérési eredmény:  . Az a helyi függőleges rendszer
szögsebesség vektora az inerciális rendszerre vonatkoztatva, melyet a következő
képlettel írhatunk le: . Az a helyi függőleges rendszer
szögsebesség vektora az inerciális rendszerre vonatkoztatva, melyet a következő
képlettel írhatunk le:
 . .
Az kifejezésében szereplő  szögsebesség vektort a
navigációs szögek szerinti forgatási mátrixok szorzatának differenciálásával
nyerhetjük az alábbiak szerint: szögsebesség vektort a
navigációs szögek szerinti forgatási mátrixok szorzatának differenciálásával
nyerhetjük az alábbiak szerint:
 . .
Talán a bemutatott képletek egy kissé
megkönnyítik annak az elképzelését, hogy hogyan lehet a másodpercenként 50
szögsebesség értékből meghatározni a jármű és a Földhöz kapcsolt referencia
rendszer forgatási mátrixát -t.
Az inerciális rendszerek általában az általunk (n)-betűvel
jelölt földrajzi koordináta rendszerben dolgoznak. Természetes, hogy szükség
esetén újabb transzformációval át tudunk térni ebből a rendszerből valamely
rögzített helyzetű térbeli vagy síkbeli koordináta rendszerbe is. Ezért, a
későbbiekben a helymeghatározás eredményét gyakran fogjuk (m) indexű
koordináta rendszerben használni utalva ezzel arra, hogy a további
transzformációkat már elvégeztük.
Ha az irodalmat tanulmányozzuk (kongresszusi
kiadványokat, szakfolyóiratokat, Internet home page-eket) három létező
rendszerről találunk információt. Ezek a VISAT
(Video-Inercial-SATellite) rendszer [20], a GPSVanTM
[21] és a GPSVision [22].
Irodalmi adatok alapján a legkomplettebbnek a kanadai Calgary
Egyetem Geomatika tanszéke és a Quebec tartomány Laval városában működő
GEOFIT vállalat közös fejlesztése a VISAT tűnik. A 3.126. ábra
vázlatosan bemutatja a rendszert, a 3.127 ábrán a gépkocsit látjuk, a 3.128. és
3.129. ábrák pedig a jobb és baloldali mérőtornyokat mutatják be.
|
|
3.126 ábra - a
VISAT rendszer vázlata
|
|
Amint az ábrákról látszik a GPS, INR
és a CCD kamarák a furgon tetején helyezkednek el. A baloldali ábra
második része bemutatja, a kamarák által felvett képpárt, míg a harmadik rész
arra utal, hogy a képek feldolgozásával milyen objektumokkal gazdagodik a
GIS. A jobboldali képen jól láthatók a gépkocsi és a rászerelt az érzékelő
együttes.
|
|

|
3.127 ábra - a
VISAT rendszer furgonja
|
|
|

|
3.128 ábra - a
VISAT rendszer baloldali érzékelőtornya
|
|
A VISAT rendszer egyik érdekessége, hogy a
furgon tetejére rögzített érzékelő blokkokban 8 CCD kamara foglal helyet
(lsd. a bal és jobboldali ábrát). Ez lehetővé teszi, hogy az objektumot mindig
azokból a képekből értékeljék ki, melyek tartalmi illetve pontossági
szempontból a legtöbbet nyújtanak.
|
|

|
3.129 ábra - a
VISAT rendszer jobboldali érzékelőtornya
|
|
A CCD kamarák vezérlését külön egység hajtja végre. E
kamarákon kívül egy videókamara is része a rendszernek (a szerepéről nem sok
szó esik a leírásokban), két L1/L2 GPS vevő, és egy INR gondoskodik a helyzet-meghatározásról,
az ABS rendszer fordulatszámláló kimenetét az expozíciós időpontok kijelölésére
használják (meghatározott távolságokra és nem eltelt időre exponálnak).
Az összes érzékelő egy pentium PC-hez van interfészelve, mely
programozott megszakításokkal vezérli a különböző adatáramlatokat.
A mérési eredmények feldolgozására szolgáló munkaállomásra
telepített szoftver együttest GEOSTATION-nak nevezték. A szoftver a
kiválasztott és kiértékelt objektumokat GIS struktúrában tárolja. Az 1997 végén
kibocsátott VISAT nevű feldolgozó programjuk már PC-n fut WINDOWS 95
alatt.
|
Az utóbbi új jelölést azért
alkalmaztuk mivel a térképezés nem csak az n-nel jelölt földrajzi
koordináta rendszerben történhet hanem pld. az UTM vagy más sík koordináta
rendszerben is. Természetesen ez utóbbi esetben az inerciális rendszer
illetve a GPS outputját előbb még át kell transzformálni az
ellipszoidi rendszerből a sík vetületi rendszerbe.
|
A 3.130 ábrán bemutattuk a mobil térképező
rendszerben lévő koordináta rendszerek egy részét. Az inerciális navigációs
rendszereknél tárgyaltakhoz képest két változást figyelhetünk meg. Megjelent
a c-vel jelölt kamara koordináta rendszer, melynek kezdőpontja
valamelyik kamara objektívjének vetítési középpontja, másfelől az eddig n-nel
jelölt földi koordináta rendszert az ábrán m-mel jelöltük.
|
Feladatunk az i indexű pont helyzetvektorának
(derékszögű koordinátáinak) meghatározása a térképezés m koordináta
rendszerében:
 ,
ahol rmi a meghatározandó pont keresett koordináta
hármasa az m rendszerben, rINRm (t)
az inerciális rendszer kezdőpontjának koordinátái az m rendszerben
(tulajdonképpen ezeket az értékeket határozzuk meg az inerciális rendszer és a GPS
integrálásából), (t) a fényképezés időpillanata, Rmb(t)
a b kordináta rendszerből az m-be forgató forgatási mátrix (az
előző pontban amikor a térképezés koordinátarendszere az n volt ezt a
mátrixot Cnb -nek neveztük), Rbc
a kamara koordináta rendszer és a test koordináta rendszer közötti
differenciális forgatási mátrix (a két koordináta rendszer tengelyeit
igyekeznek párhuzamosan elhelyezni) - elemeit a kalibráció során határozzák meg
a mérés előtt, rc az objektum koordinátái a képkoordináta
rendszerben, ab a c rendszer kezdőpontjának
koordinátái a b rendszerben (szintén a kalibrálás során mérik), Si
méretarány tényező, mely az egy pont - egy kamara viszonyra jellemző. ,
ahol rmi a meghatározandó pont keresett koordináta
hármasa az m rendszerben, rINRm (t)
az inerciális rendszer kezdőpontjának koordinátái az m rendszerben
(tulajdonképpen ezeket az értékeket határozzuk meg az inerciális rendszer és a GPS
integrálásából), (t) a fényképezés időpillanata, Rmb(t)
a b kordináta rendszerből az m-be forgató forgatási mátrix (az
előző pontban amikor a térképezés koordinátarendszere az n volt ezt a
mátrixot Cnb -nek neveztük), Rbc
a kamara koordináta rendszer és a test koordináta rendszer közötti
differenciális forgatási mátrix (a két koordináta rendszer tengelyeit
igyekeznek párhuzamosan elhelyezni) - elemeit a kalibráció során határozzák meg
a mérés előtt, rc az objektum koordinátái a képkoordináta
rendszerben, ab a c rendszer kezdőpontjának
koordinátái a b rendszerben (szintén a kalibrálás során mérik), Si
méretarány tényező, mely az egy pont - egy kamara viszonyra jellemző.
A vektor egyenlet négy ismeretlent tartalmaz: rmi
három koordinátáját és az Si méretarány tényezőt három
egyenletben, a vektor egyenlet ugyanis három skaláris egyenletre bontható. Ha
ugyanaz a pont N képen képződik le úgy a meghatározás szabadságfoka (3N-3-N).
Ha tehát a kérdéses pont csak két képen van rajta úgy a meghatározás
szabadságfoka 1.
A rendszer 30 cm-es
meghatározási pontosságot célzott meg, ehhez a GPS/INR helymeghatározást 10-15
cm-es pontossággal kell végezni, az INR szögértékei 1'-5' pontosak, a
kalibrálás során mért távolságok 2-5 mm hibával terheltek, a kalibrált
szögértékek pedig 1'-5' pontosak. A fotogrammetriai kiértékelés pontossága 0.5
pixel.
A rendszer működésének megkezdése előtt a kamarák belső
adatait önkalibráló sugárnyaláb kiegyenlítő eljárással határozzák meg. Teszt-pontmező
fényképezésével és kiegyenlítésével pedig meghatározzák a kamarák és INR
kölcsönös helyzetét. A cél érdekében a kiegyenlítésbe olyan kiegészítő
feltételeket visznek be, melyek a két rendszer egymáshoz viszonyított
mozdulatlanságán alapulnak.
A kísérleti mérések során 30 m-es maximális kamara -
objektum távolság esetén a középhiba nem haladta meg vízszintes értelemben a 16
cm-t, magassági értelemben pedig a 7 cm-t.
|
A GPSvanTM rendszert az Ohio Állami Egyetem Térképészeti
Központjában fejlesztették ki az elmúlt 5 évben. A rendszer furgonját a
3.131, blokksémáját pedig a 3.132 ábrán mutatjuk be.
Amint az utóbbi ábrából látható a rendszer nem alkalmaz inerciális navigációs
rendszert a GPS-szel nem mérhető helyek (alagutak, erdők, magas
beépítésű városok, stb.) pozicionálására, e helyett a kerékfordulatszámok
méréséből interpolálja két GPS mérési pont közé a helyzeti
koordinátákat.
|
|

|
3.131 ábra - a
GPSvan furgon
|
|
Mivel a kocsi
helyzetét magasságilag is meg kell határozni ez csak akkor lehetséges, ha a
pozicionálásba a bukás értéket mérő giroszkóp szögértékeit is bevonják,
valószínű azonban (bár erről az ismertetőben nem szólnak), hogy a giroszkópok
leolvasásait a másik két koordináta növekmény számításához is felhasználja az
angolul dead-reckoning-nak (DR) nevezett relatív
helymeghatározó rendszer. A robusztus becslő mibenlétéről sincs szó az
ismertetésben, de erősen valószínűsíthető, hogy ez a rendszer is Kalman
szűrőt használ.
|
|
3.132 ábra - a
GPSvan rendszer blokksémája
|
|
|
A gépkocsi két db. 1.8 m.-es bázison rögzített CCD kamarával
van ellátva. Az ipari-kísérleti feladatokhoz 768x480 pixeles kamarákat
használtak. Mivel ez a kamara viszonylag durva felbontásával már 10 m
tárgytávolság esetén eleve 5-15 cm hibával terheli a mérést, kísérleteket
végeztek 1000x1000 pixeles kamarákkal is, melyekkel elérhető, hogy a
felbontásból eredő hiba 5 m tárgytávolság esetén kevesebb mint 3 cm, 25 m
tárgytávolság esetén pedig kevesebb mint 15 cm legyen. Mégis, az ipari mérések vizsgálata (több mint
9000 km vasúti váltó és egyéb vasúti jelölés felmérése) azt bizonyította, hogy
az átlagosan 50 cm hiba főrészét kb. 30 cm-t a DR rendszer okozza.
|
A Lambda Tech. International GPSVision
nevű rendszerének leírásából két olyan kérdésre is választ kapunk, melyekről
az előző ismertetések hallgattak: milyen típusú GPS észlelést
alkalmaznak és milyen formában használják a Kalman szűrőt.
|
|

|
3.133 ábra - a
GPSVision rendszer furgonja
|
|
Előbb azonban ismerjük meg a rendszer
általános jellemzőit.
Az első generációs GPSVision egység egy Trimble ProXL kód-fázis GPS vevőből,
egy Liton LN-200 inerciális navigációs rendszerből, és két nagyfelbontású
szines CCD kamarából áll. Lehetőség van más GPS alkalmazására is pld. a Trimble
SSI GPS vevőt használják ha a pontmeghatározás pontossági igénye 10-20 cm.
Másik érdekes tulajdonsága a rendszernek, hogy az érzékelők a 3.134. ábrán
látható dobozba vannak szerelve és tetszés szerinti gépkocsira felerősíthetők.
|

|
3.134 ábra - a
GPSVision rendszer mérődoboza
|
A rendszer a GPS távolságok kettős különbsége
alapján működik. Ha i és j jelöl két műholdat, b az ismert
bázis ponton álló GPS vevő helyét, r pedig a mozgó vevő helyét,
tehát a mérőkocsit, akkor a mért távolságok különbségére felírható, hogy
egyenlő a koordinátákból számolható távolságok különbségével. Jelöljük R-el
az úgynevezett pseudo távolságokat,  -val a koordinátákból számítható
távolságokat (pld. -val a koordinátákból számítható
távolságokat (pld.  ), akkor ), akkor
 . .
Mivel a műholdak koordinátáit ismerjük, a bázis állomás koordinátáit szintúgy,
a R értékeket megmértük, a kifejezésben csak az r három
koordinátája az ismeretlen. A megoldáshoz tehát három kettős
távolságkülönbségre van szükség, amihez legalább négy olyan szatellita
szükséges, mely mind a mozgó, mind a bázis állomásról észlelhető.
A Kalman szűrő olyan matematikai eljárás, mely a
dinamikus modell felhasználásával megbecsüli valamely k+1 időpontban a
rendszer állapotát, és egybeveti ezt az értéket valamely pontos értékkel a
kérdéses időpontban. A rendszer statisztikai tulajdonságai valamint a becsült
és mért értékek eltérése alapján a módszer megjavítja a vizsgált szakaszra (a
két mérés közé) eső előzetes értékeket és a folyamat folytatódik.
A GPSVision decentralizált szűrő módszert alkalmaz,
melynek az a lényege, hogy nem számolja ki a Kalman féle becsült értékeket
hanem e helyett az inerciális rendszer outputját használja. A simítás javítása
érdekében a szűrőeljárást mindkét irányba lefuttatják.
A külső adatokkal ellátott képek kiértékelésére WINDOWS NT/95
alatt futó felhasználóbarát programrendszert is kidolgoztak. A rendszer
lehetővé teszi a képek szemlélését, képpárok összeválogatását és a felhasználó
által kijelölt objektum szemi-automatikus kiértékelését.
Bár a Mobil
Térképező Rendszerek egyelőre még csak gyakorlati felhasználásuk kezdeti
stádiumában vannak nem nehéz megjósolni, hogy néhány éven belül
nélkülözhetetlenek lesznek a vonalas létesítmények, városok, közművek,
ingatlanok, stb. felmérésében.
Megjegyzéseit
E-mail-en várja a szerző: Dr Sárközy Ferenc
Az oldal a szerző engedélyével, a GIS Figyelő által formailag módosított változat.
|
|

 .
.