Dr. Sárközy Ferenc: Térinformatika
Műholdas helymeghatározás II
Ebben a részben megismerkedünk
- a
műholdas helymeghatározás mérési módszereivel, ezek között
- néhány pszeudotávolságmérésen alapuló eljárással úgymint
- a statikus,
- kinematikus és
- differenciális pontmeghatározással
- és az alábbi fázismérésen alapuló technológiákkal:
- statikus relatív pontmeghatározás,
- gyors statikus relatív pontmeghatározás,
- kinematikus relatív helymeghatározás, illetve ez
utóbbihoz kapcsolódva néhány
- inicializálási technikával;
- néhány alkalmazással,
- és a GPS vevőkkel.
Mérési módszerek
Nagyon nehéz tiszta és világos terminológiát
használni a GPS módszerek és sémák bemutatásakor. A technika folyamatos
fejlődésben van, ami gyakran azt eredményezi, hogy egy kismértékben módosított
régi módszernek vadonatúj elnevezést adnak. Ez még azzal is bonyolódik, hogy a
különböző műszergyártók gyakran ugyanannak a módszernek is más-más nevet adnak.
A fentiek magyarázzák, hogy miért döntöttünk úgy, hogy csak a legfontosabb, valóban
különböző módszereket fogjuk szerepeltetni rövid összeállításunkban.
Az eredmény megjelenése, azaz a felhasználás
szempontjából a módszereket két nagy csoportra oszthatjuk:
- az első csoport tagjai a mérés után
gyakorlatilag azonnal szolgáltatják az eredményt, ezek a jelen idejű
vagy real time módszerek;
- a második csoportba azok az
elárások sorolhatók, melyek a mérési eredményekből utófeldolgozás -
post processing során számítják a keresett mennyiségeket
(leginkább a koordinátákat).
Utófeldolgozásra három okból lehet szükség:
- egy pont
meghatározásához, a nagyobb pontosság érdekében, nagyon sok mérést
végzünk, és gyakran, a műhold helyzetét sem a sugárzott, hanem a GPS ellenőrző
központ által pontosított pályaadatokkal kívánjuk figyelembe venni;
- a
mérőműszerben nincs megfelelő szoftver (ettől az esettől ma már
eltekinthetünk);
- a
meghatározandó mennyiségeket két (vagy több) vevő szimultán észleléseiből
lehet kiszámítani, de a vevők között nincs rádiókapcsolat.
Kódfázis mérésen alapuló módszerek
Pontmeghatározás pseudo távolságokkal
Az első alapvető módszer a
pontmeghatározás pseudo távolságok segítségével. Ez a módszer
rendszerint jelen időben szolgáltat koordinátákat. Ha statikus
üzemmódban használjuk (a vevő egy ideig a ponton tartózkodik) és nincs
szükségünk jelen idejű koordinátákra, úgy a módszer pontossága eléri az egyméteres
szintet. Ez a pontosság még javítható az
utófeldolgozásban alkalmazott simító technikák segítségével.
A kinematikus pontmeghatározás
pseudo távolságokkal (a vevő antenna a gépkocsira van szerelve és azzal
együtt mozog) alkalmas arra, hogy a gépkocsi pályáját 10-100 m.-es pontossággal
jelen időben meghatározza.
|
|
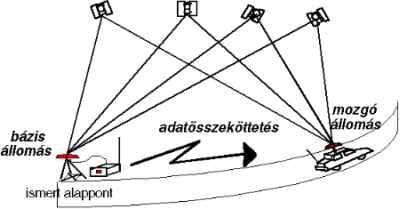
3.107 ábra - a
jelenidejű differenciális helymeghatározás alapesete
|
A differenciális helymeghatározáshoz (3.107 ábra) két vevőre és a
köztük kiépített adatátviteli (rádió) kapcsolatra van szükség. A
bázisállomást ismert koordinátájú pontra állítják, a mozgó állomás a
gépkocsiban helyezkedik el. A bázisállomás, mivel ismertek az álláspont
koordinátái a műholdak koordinátáit pedig veszi a navigációs üzenetből, ki
tudja számolni a műholdak tényleges távolságát és ugyanakkor meg is méri
azokat.
|
|
A távolságok
különbségeit differenciális korrekcióként továbbítja az adatátviteli
csatornán a mozgó állomásra. Ez utóbbi a korrekciók felhasználásával számítja
és jelen időben kijelzi és tárolja a jármű helyzetét valamint ahhoz kapcsolva
azokat a kiegészítő információkat (útszerelvények, elágazások, úthibák stb.),
melyeket a kocsiban ülő operátor bebillentyűz. Természetesen a differenciális
módszer nem csak gépkocsikon alkalmazható, de repülőgépeken, hajókon,
traktorokon, földmunkagépeken és gyalog is.
A differenciális korrekciókat a bázisállomás (master)
minden vehető műholdra külön-külön számolja és továbbítja a mozgó állomásnak
(rover) ezért nem szükséges, hogy a vevő mindig ugyanazt a négy műholdat
észlelje. A javításokon kívül a javítások ideje és változása is
továbbításra kerül, így a rovernek lehetősége van, hogy a pillanatnyi javítást
extrapolációval számolja.
Az üzeneteket az RTCM SC-104 nevű szabvány szerint
küldik. A szabvány 2l féle üzenet típust különböztet meg, ezek közül az első
és kilences típusú üzenetek tartalmaznak tulajdonképpeni differenciális
korrekciót, azzal a különbséggel, hogy az egyes mind a 12 látható műholdra
vonatkozó korrekciót egy üzenetben küldi, míg egy kilences típusú üzenet csak
három műholdra vonatkozó javítást tartalmaz, azaz négy kilences üzenet
egyenértékű egy első típusúval.
Először az USA-ban majd a világ többi országában is
olyan szolgáltatást vezettek be, mely szükségtelenné teszi a felmérő csoportok
számára bázisállomások telepítését. A bázisállomásokat ugyanis stacionárisan
hozzákapcsolták a szolgálati vagy műsorszóró rádióadókhoz és a javításokkal
ezek oldalsávját modulálják (hazánkban 1998 január elsején indul ilyen
szolgáltatás).
Az első stacionáris javításközvetítő hálózatot az USA Parti
Őrsége telepített a hajókkal kapcsolatot tartó rövidhullámú rádióadó hálózat
felhasználásával. Az újabb szárazföldi rendszerek esetén előnyben részesítik a
műsorszóró UHF és VHF adókat, mivel ezek nagyobb sávszélessége gyakoribb
üzenetek küldését teszi lehetővé.
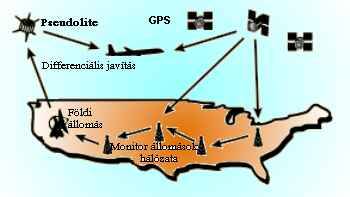
Természetesen a légi közlekedés számára ez a megoldás
több okból sem jó ezért az USA repülésirányítási hatósága (FAA) kidolgozta a
WAAS projektet (nagy térségi javítórendszer angol szavai kezdőbetűiből képzett
rövidítés), 24 db., az USA területén egyenletesen elosztott megfigyelő állomás
adatait egy földi állomás a külön e célból fellőtt geostacionáris pályára
állított műholdra továbbítja, mely kettős szerepet játszik (3.108 ábra). A
geostacionáris műhold, melyet az amerikai szakzsargonban a "pseudo
satellite" azaz ál-műhold szó párból pseudolite-nek neveznek
a GPS L1 frekvenciájához közeli 1575.42 MHz-es frekvencián sugároz,
melyet a repülőgép GPS vevője közvetlenül vesz (nincs tehát szükség külön rádió
kapcsolatra). A pseudolite jele az RTCM SC-104 szabvány szerinti
differenciális korrekciós üzeneteken kívül azonban még a GPS-éhez hasonló
távolságmérő kódot is sugároz és így a repülőgépen végzett pseudo
távolságmérést egy értékkel kiegészíti.
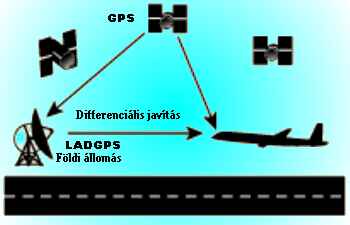
Mivel ez a rendszer csak u.n. első kategóriájú
leszállást (a látótávolság nagyon rövid, de nem zérus) biztosít, ezért a FAA
terveiben szerepel egy LAAS (helyi javítórendszer) elnevezésű projekt is (3.109
ábra), mely a leszálló pálya mellé telepített stacionáris állomásról olyan
pontos differenciális javításokkal látja el a repülőgép GPS vevőjét, hogy a gép
a GPS információra támaszkodva a harmadik kategóriájú leszállásra (zérus
látótávolság) is alkalmas legyen.
|
|
3.108 ábra - a
WAAS nagytérségi differenciális GPS javító rendszer
|
|
|
|
3.109 ábra - a
LAAS lokális differenciális GPS javító rendszer
|
|
Mivel a szárazföldi differenciális helymeghatározás pontossága
megköveteli, hogy a bázis állomások 100 km.- 200 km. körüli távolságra legyenek
a mozgó állomásoktól ez jó összhangban van az URH adók telepítési sűrűségével.
A mozgó állomás a javításokat egy vevőegység segítségével tudja venni és
átalakítani. Az államilag sugárzott javítások vétele az USA-ban ingyenes, a
helyenként előforduló magánszolgáltatók, bérleti díj ellenében kódkártyát
illesztenek a vevőhöz.
A módszer pontossága sok tényezőtől függ. Ezek
közé soroljuk
- a szelektív elérhetőséget (SA);
- a javítási
üzenetek gyakoriságát;
- a javítást
hordozó rádióhullámok vételi körülményeit;
- az
telepített és mozgó műszer kód meghatározási pontosságát;
- a
korrekciós jelsorozat típusösszetételét;
a visszaverődések mértékét és hatásuk csökkentését.
Sztenderd szárazföldi
esetben, jó minőségű telepített és vevőállomást feltételezve, az SA aktuális,
viszonylag alacsony szintjén, ha az RTCM SC-104 szabvány által javasolt, az URH
sávban lehetséges maximális javítási gyakorisággal sugározzák a javításokat (50
bit/s adatsebesség esete, ami 21 másodpercenkínti új javítást jelent 12
műholdra), a helymeghatározás középhibája 95%-os valószínűségi szinten jobb
mint 3 méter (3.110 ábra).
Az előző bekezdésben azért hangsúlyoztuk ki a sztenderd
körülményeket, mivel egyrészt a polgári célú C/A kódú vételt az amerikaiak Sztenderd
Helymeghatározó Szolgáltatásnak (SPS) nevezik, másrészt két műszaki újdonsággal
igyekeznek az egyes cégek napjainkban tökéletesíteni a DGPS vevőket, melyek
túlmutatnak a sztenderd technikai megoldásokon. Ezeket az újításokat azonban
egyelőre rendszerint csak mint "extrákat" forgalmazzák.
|
|
|
|
3.110 ábra - a
sztenderd jelenidejű differenciális helymeghatározás pontossága
|
|
Az egyik ilyen megoldás a Narrow
CorrelatorTM, egy olyan technika, mely a
keresztkorrelációs kódfázis
mérési technikát tökéletesíti. A módszer lényege, hogy akkor lehet
a vett és a referencia kód relatív helyzetét pontosan megmérni, ha sikerül a
vett jelek derékszögű négyszög alakját megőrizni, ez pedig a Furier sorok
elmélete alapján akkor lehetséges, ha a figyelembe vett frekvencia tartomány
végtelen.
A gyakorlatban ez azt jelenti, hogy nagyon széles
frekvencia spektrumból kell a jeleket helyreállítani. A technika ujdonsága
többek közt abban van, hogy azokkal az oldalsávokkal dolgozik, melyeket
a sztenderd vevők kiszűrnek a vett jelből.
A visszaverődések csökkentésére
kidolgozott technológia (MET) a kódfázismérést végrehajtó áramköri hurkot egészíti
ki egy úgynevezett MRDLL áramkörrel, mely a maximimum likelihood módszerrel
meghatározza az eredeti és a visszavert hullám paramétereit, majd a rendszer
ezekből az értékekből javítja az eredeti kód fázismérő szolgáltatta
eredményeket.
Elvileg az antenna kialakítással is csökkenteni lehet a
visszaverődések hatását, ezek a megoldások azonban egyelőre még kutatási
stádiumban vannak.
Vivőhullám fázismérésen alapuló módszerek
A második alapvető módszer a vivőhullámok fázisából meghatározott pseudo távolságokat
használja. A távolság határozatlanságát (a teljes
vivőhullámok számát a vevő és a szatellita között) vagy a helymeghatározás
megkezdése előtt valamilyen inicializálási eljárással kell meghatározni, vagy a
hullámszám meghatározható magában helymeghatározási folyamatban is: ezt nevezik
"röptében" (OTF) történő határozatlanság feloldásnak. Mindkét esetben legalább két vevőre van
szükségünk valamint egy ismert koordinátájú pontra. Az
OTF-hez e mellett olyan vevők szükségesek, melyek mind az L1 mind az L2
frekvencián képesek mérni, és mindkét vevőnek legaláb öt azonos műholdat
kell észlelnie.
|
|
3.111 ábra -
statikus relatív pontmeghatározás
|
A statikus relatív pontmeghatározás esetén az egyik vevő az ismert koordinátájú alapponton mér, míg egy
vagy több másik vevő a meghatározandó új pontokon. A méréseket az ismert
illetve új pontokon szimultán kell végezni ugyanazokra a műholdakra (3.111
ábra).
|
|
A mérés időigénye a régi és új pontok távolságától függ: 15-30
km. hosszú vonalak esetén mintegy 1.5-2 óra, A statikus relatív
pontmeghatározás biztosítja a legnagyobb pontosságot (a fenti távolságok esetén
mintegy 1 - 2 cm.-t), ezért ezt a módszert kizárólag geodéziai,
felsőrendű alappont meghatározásra használják. Ez a pontosság még tovább
növelhető, ha az utófeldolgozásban a javított pályaadatokat használják. A
szakirodalom szerint a pontosságnövekedés ebben az esetben 5 - 10 szeres is
lehet.
Az újabb szoftverek lehetővé teszik a gyors statikus relatív pontmeghatározást. Ez a
technika kombinálja a kód és vivő fázis méréseket a statikus inicializálás
gyorsítása érdekében. A módszer tehát mind kódokból történő pseudo távolság
méréseket mind pedig mindkét frekvencián történő fázisméréseket használ a
helymeghatározáshoz. Egy mérés 5 - 10 percig tart, a módszer pontossága egy
nagyságrenddel rosszabb mint a statikus relatív helymeghatározásé. Rendszerint
alappont sűrítésre használják.
|
|
|
|
3.112 ábra -
kinematikus relatív pontmeghatározás
|
A pontos módszerek közül a vivőhullám
fázisméréssel végrehajtott kinematikus relatív
helymeghatározás (3.112 ábra) bizonyult a legtermelékenyebbnek. Az
első lépés a két vevő inicializálása. Számtalan megoldást ismerünk e
feladatra. Az inicializálás nem más mint a teljes hullámok számában lévő
határozatlanság feloldása a mérés előtt. Az inicializáláshoz szükségünk van
egy távolságra amit bázisnak neveznek. Attól függően, hogy a bázist milyen
módon határozzák meg az inicializálási eljárásokat
három főcsoportba oszthatjuk.
|
Az első módszer abban az esetben használható, ha nagy
pontossággal (3-5 mm.) ismerjük az ismert alappont és az első új pont
távolságát. Ennek a bázisnak rövidnek kell lennie, a távolság nem haladhatja
meg a két kilométert.
Második módszerként azt az esetet tárgyaljuk, amikor a
bázis másik végpontját statikus relatív helymeghatározással határozzuk meg.
Ebben az esetben a régi és új ponton 1-2 órás szimultán méréseket végzünk, majd
az eredményt az utófeldolgozásból nyerjük.
A harmadik módszernek külön neve van 'swapping',
ami magyarul 'cserélgetésnek' fordítható. Az inicializálás első fázisában az A
vevő az ismert alapponton dolgozik, a B vevő pedig az első új
ponton. Néhány percnyi észlelés után a két állomás helyét meg kell cserélni, de
úgy hogy csere közben is észleljenek legalább 4 műholdat. A harmadik lépésben
hasonló feltételek mellett, azaz az észlelést tovább folytatva visszaállítják
az állomások kezdetben elfoglalt helyzetét. Ezt az inicializálási módszert és
az azt követő kinematikus felmérést próbáltam bemutatni a következő appletben,
mely természetesen csak a .htm változatban működik. Az animáció és a rajzok minőségéért
elnézést kérek. Mentségemre csak azt hozhatom fel, hogy így is 38 képet kellett
rajzolnom, illetve, hogy a rajzolás sohasem volt erős oldalam.
Az inicializálás után az A vevő folytatja a mérést az
ismert ponton míg a B vevő az úgynevezett vándor (angolul rover)
bejárja a megmérendő pontokat. (Az appletben csak két pont megmérése volt a
feladat).
Az egész mérés ideje alatt (tehát a pontok közötti úton is)
mindkét vevőnek folyamatos kapcsolatot kell fenntartania legalább négy
műholddal. Ahhoz hogy ezt a feltételt teljesíteni lehessen igen gondos előzetes
terepszemlével kell kijelölni a vándor útját. A fák, épületek, vezetékek stb.
akadályozhatják a hullámterjedést, ezért a módszer csak teljesen nyílt
területek felmérésére alkalmas. A módszer pontossága a centiméteres tartományba
esik.
Azok a módszerek, melyek a vivőhullám fázismérésén alapulnak a
koordinátákat általában utó-feldolgozásos üzemmódban számítják.
Ez azzal magyarázható, hogy a koordináták számításához legalább két mérőállomás
azonos idejű mérési eredményeire van szükség. Napjainkban azonban már olyan
kereskedelmi berendezésekről is olvashatunk a szakfolyóiratokban sőt a
reklámokban is, melyek azt a célt tűzik ki, hogy rádió-adatátvitel és pótlólagos terepi
számítóegység segítségével e módszerrel is jelen
idejű koordináta meghatározást biztosítsanak.
Amint azonban már említettük, az OTF (röptében inicializáló) real
time kinematikus rendszerek a mellett, hogy a szabatos geodéziai
vevőknél megszokott módon mind az L1 mind az L2 hullámokat veszik
egyszerre legalább 5 műholdat kell, hogy vegyenek és RTCM SC-104 szabvány
szerinti üzeneteket adó és vevő autonóm rádió adó-vevő felszereléssel kell
rendelkezniük. Arról azonban még nem szóltunk, hogy ezeknek az adó-vevőknek a hatósugara
10-15 km.
Figyelmet érdemel az is, hogy mi az OTF szerepe. Használatára általában
nem a mérés indításakor van szükség, akkor valamelyik ismertetett módon
(általában két ismert alappontra támaszkodva) elvégzik az iniciálást. Az OTF
akkor kap szerepet, ha valamilyen külső vagy belső okból a kapcsolat a
műholddal megszakad és az inicializálást mérés közben kell helyre állítani.
Fel szeretnénk hívni az
olvasó figyelmét arra is, hogy az amerikai irodalom rendszerint a relatív
kinematikus meghatározást is "differenciális GPS"-nek nevezi és vagy
hozzáteszi, hogy vivőfázis mérésen alapul, vagy nem.
Összefoglalva a különböző GPS technikák
tulajdonságait alkalmazásukra az alábbi következtetéseket
vonhatjuk le.
A relatív statikus helymeghatározás a
leghatékonyabb eszköze az országos vízszintes alappont hálózat létrehozásának.
A gyors relatív statikus technikák alkalmasak az
alappont sűrítésre, de a szoftver és hardver magas ára egyelőre hátráltatja széleskörű
alkalmazásukat.
A differenciális helymeghatározás jól
használható az 1:10000, és 1:25000 méretarányú felmérésekben, különösen az
úthálózat vonatkozásában, mivel ezen a gépkocsi gyorsan tud mozogni.
A relatív kinematikus helymeghatározás használható
nyílt területek nagyméretarányú háromdimenziós felmérésére, de egyelőre az
elektronikus tahimetria olcsóbb és eredményesebben használható az ilyen jellegű
feladatokban.
Ha a GPS vevőt gépkocsiba szerelik ez a módszer is
széleskörűen alkalmazható a közúthálózati fedvények létrehozására és
aktualizálására.
A háromdimenziós felmérés említése óhatatlanul kikényszeríti,
hogy szóljunk néhány szót a GPS magasságmérő képességéről.
Ha nagyon röviden akarunk fogalmazni akkor azt kell mondanunk,
hogy a GPS-el meghatározott ellipszoid feletti magasságok mintegy 1.5-2-szer
pontatlanabbak a vízszintes koordinátáknál. Nagyobb probléma azonban, hogy a számunkra megszokott
ortometrikus magasságot csak akkor számíthatjuk ki az ellipszoid feletti
magasságból, ha ismerjük az adott pontban a geoidundulációt . Ez azonban kellő megbízhatósággal az esetek többségében nem áll
rendelkezésünkre.
Ezek azok az okok, amiért a GPS vízszintes helymeghatározó
képességét helyeztük tárgyalásunk homlokterébe. Megállapíthatjuk, hogy a GPS
önmagában nem képes átfogó megoldást adni a földi felmérés problémáira.
A leghasználhatóbb módszer a
differenciális helymeghatározás, de bizonyos
esetekben ennek az alkalmazhatósága is korlátozott. Amint említettük a módszer
megbízhatósága 1 - 5 m. (egyes szerzők 5 - 10 m.-ről is írnak), így nem
használható a nagyméretarányú felmérésben. Bár a módszer nem igényli a
folyamatos kapcsolatot a mozgó állomás és a műholdak között, mérni csak ott
lehet ahol a kapcsolat létezik. Miután a műholdakkal a kapcsolat helyreállt egy
bizonyos ideig a mérések kevésbé pontosak, ezért csökkenteni kell a mérési
sebességet.
A közutak felmérése folyamatos adatokat igényel azokon a
helyeken is, ahol a műholdakra nincs rálátás, mint mély bevágásokban, erdőkben
városokban stb. A kiesett zónák pótlására olyan mérő gépkocsikat készítenek,
melyek kiegészítő navigációs rendszerekkel vannak ellátva (fordulat számláló,
elfordulásmérő, sebességmérő, inerciális rendszer stb.). A szoftver ezek adatai
segítségével végzi az interpolációt a kapcsolat megszakadása és újrafelvétele
között. Meg kell említenünk, hogy a mérőkocsikat gyakran felszerelik digitális
sztereó kamarákkal illetve videó felvevő berendezésekkel, az ilyen együtteseket
mobil mérőrendszereknek hívjuk.
Ha a kamarákat és a GPS vevőt szinkronizálják, úgy lehetővé válik az
úttartozékok billentyűzés helyetti automatikus rögzítése, e mellett az
attraktívabb helyszínek multimédiás megjelenítése, műtárgy-, épület homlokzatok
felmérése stb.
A differenciális helymeghatározást gyakran alkalmazzák nagy
területen szétszórt objektumok (pld. öntözőhálózat csatornaszemei) felmérésére.
A módszer igen hatékony, ha a műholdakra való rálátást nem akadályozzák a fák
vagy épületek. Ellenkező esetben azonban a poláris felmérés, vagy ívmetszés
hagyományos részletmérési
módszereit kell alkalmazni. Ilyen esetekben két segédpontot mérünk a GPS-el
majd az objektumot a két pont által alkotott mérési vonalról a korábbiakban
elmondottak szerint bemérjük.
A tanulság az, hogy ilyen jellegű feladatoknál a GPS vevőn
kívül legalább egy távmérőt és teodolitot kell a kocsiban magunkkal vinnünk.
A GPS adatgyűjtésről szóló fejezeteket néhány gyakorlati
jelentőségű műszeres újdonsággal zárjuk.
Sajnos nem vállalkozhatunk arra, hogy részletesen ismertessük
a GPS vevőket, illetve vevő rendszereket, mivel ez túlnő e fejezet keretein.
Amit itt nyújtani tudunk az iránymutatás az olvasónak arra vonatkozóan, hogy
hol mit keressen, ha GPS vevőt akar használni.
Mindenek előtt érdemes elmondani, hogy mit értenek a GPS vevők
gyártói vevő rendszereken. A legtöbb felmérési alkalmazás
legalább két vevőt igényel, gyakran szükség van közvetlen rádiókapcsolatra, a
differenciális javítások dekódolására, illetve a jelen idejű,- vagy
utófeldolgozáshoz szoftverre és számítógépre, nos ezek együttesen valamint a
számtalan kiegészítő (műszerláb, műszertalp, kábelek, akkumulátorok, töltők,
memóriák, stb.) alkotják a kérdéses rendszert.
Hogyan osztályozhatjuk a GPS vevőket?
- Alak
szerint,
- felhasználás,
szerint,
- műszaki
paraméterek szerint
- és működési
elv szerint.
|

|
3.113 ábra - Magellan 4000 tipusú kézi GPS vevő
|

|
3.115 ábra - ASHTECH Z-12-es vevő
|
3.114 ábra -
Trimble Pathfinder rendszer ProXRS vevővel
|

|
3.116 ábra -
"Fekete doboz" ASHTECH GG-24-es szenzorral
|

|
Az alak szerinti osztályozás nagyjából fedi a felhasználás szerinti osztályozást is. Ezen belül
megkülönböztetünk:
- kézi
GPS vevőket,
- (gyalog)
felmérő rendszereket,
- statikus
felmérő rendszereket,
- beépített
GPS szenzorokat.
Természetesen mint minden osztályozás ez is tartalmaz kompromisszumokat,
de talán segíti az eligazodást.
A kézi GPS vevők önálló
kézben tartható műszerek, általában turista célokat szolgálnak. A 3.113. ábrán
látható MAGELLÁN 4000 XL típusú rendszer például beépített antennával,
térképező szoftverrel és viszonylag nagy diszplével rendelkezik, melyen
folyamatosan megrajzolja a megtett utat. Ára kb. 300 angol font. Az ehhez a
kategóriához tartozó műszerek lényegében a műszaki megbízhatóság, és
megjelenítési, transzformálási képességekben különböznek, az egyszerűbb berendezések
már 200 angol fontért beszerezhetők. Hasonló képességű vevők hobby hajózási
célra telepíthető kialakításban is készülnek.
A (gyalog) felmérő rendszerek alaprendeltetése tulajdonképpen megegyezik a földi felmérésnél
használt elektronikus tachiméterekével.
|
|
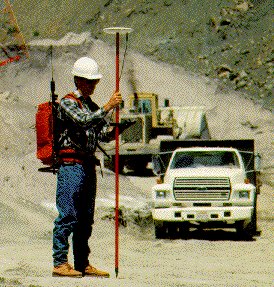
3.117 ábra -
Térbeli adatgyűjtés a GIPSY felmérő
rendszerrel (GIPSY program + HUSKY F2 kézi
adatgyüjtő + ASHTECH Z-12-es szenzor)
|
|
|
|

|
3.118 ábra - Trimble TS 4800
|
|
Ahogy azt a 3.117 ábrán láthatjuk a földmérő
kezében viszi az antennát és a kézi adatgyűjtő-vezérlőt tartó rudat (a kézi
adatgyűjtő-vezérlő a rúdhoz kötött tartó elemre helyezhető illetve arról kézbe
vehető) és a rúddal rááll a pontra. Ezután bebillentyűzi a szükséges leíró
adatokat valamint kezdeményezi a koordináta számítást és rögzíti az attribútumokat
és a koordinátákat, majd a következő pontra megy. A hátizsákban helyezik el a
fekete dobozba épített vevő-szenzort valamint a rádió vevő berendezést. Bár az
ábrán nem teljesen látszik a mérőrendszerhez tartozik még egy telepített vevő
is, mely számolja és sugározza a differenciális kód vagy fázismérési
korrekciókat (ez a vevő csatlakozhat egy nyilvános rádióadóhoz is, amint erről
fentebb már szóltunk).
Északamerikában a rendszert kézi adatrögzítő helyett
előszeretettel úgynevezett toll számítógéppel (pen computer) használják.
Hasonló mozgó egységet (rover) mutat be a 3.114-es ábra is
talán csak azzal a különbséggel, hogy a Trimble saját adatrögzítő-vezérlővel és
szoftverrel látja el a Pathfinder-nek keresztelt rendszerét.
Talán még érdekesebb ergonómiai szempontból a 3.118. ábrán
látható Trimble Total Station 4800, mely már nem igényel
hátizsákot, ugyanis mind a GPS vevőt, mind a rádió modemet és antennáját a rúd
tetejére a GPS antennával egybeépítve helyezték el, míg az akkumulátorok a rúd
alsó részébe foglalnak helyet. A berendezés komplett súlya 3.9 kg.
A statikus felmérő rendszerek alatt olyan GPS
vevő kialakítást értünk, melyet hosszabb állásponton tartózkodás indokol. A
3.115 ábrán látható kialakítás szükségtelenné teszi a kézi vezérlőt és a
hátizsákba helyezhető szenzort, mivel mindezek egy kijelzővel, gombokkal, ki,-
és bemeneti csatlakozókkal ellátott műszerházba kerülnek beépítésre. A
műszerhez kábelen csatlakozó antennát pillértalpra esetleg műszerállványra
rögzítik.
Három- négy évvel ezelőtt az alappont meghatározáshoz szinte
kizárólag ilyen kialakítású vevőket alkalmaztak. Ma is ilyen a referencia
pontokon állandóan működő fő (master) állomások design-ja.
A beépített GPS szenzorokat még számos
alcsoportra lehet osztani. Legáltalánosabb a 3.116 ábrán látható fekete doboz
megoldás, mely RS-232-es soros vonalakon keresztül csatlakozik bármely mérő-együtteshez.
A másik megoldásban a szenzort számítógép kártyaként
alakítják ki (PCMCIA), mely hasonlóan a hangkártyához vagy a grafikus kártyához
bármely korszerű asztali számítógépbe bedugható.
Egy harmadik variánsban a számítógépbe (rendszerint laptop-ba)
beépítik a szenzort tartalmazó kártyát, ezt a típust a bedugható kártyától
megkülönböztetendő GPS board-nak hívják angolul.
A felhasználás szerinti osztályozásban
követhetjük a fejezet módszereit. Beszélhetünk egyszerű navigációról
(autonóm pseudo távolság méréssel polgári és katonai variánsban), differenciális
navigációról (rendszerint repülőgépeken és gépkocsikon, illetve a parti
őrség hajóin), fázismérésen alapuló abszolút és relatív
pontmeghatározásról (szabatos geodéziai mérések), GIS adatok gyűjtéséről
vagy részletpont meghatározásról a különböző pontossági igényeknek megfelelően
differenciális kódméréssel illetve differenciális fázisméréssel (kinematikus
módszer). Ez utóbbi esetében megkülönböztetjük a jelen idejű illetve az utófeldolgozással
történő adatszolgáltatást. A GIS adatok gyűjtésénél a gyalog mérés
mellett egyre nagyobb szerepe van a mozgó járművön történő mérésnek.
Beépített GPS rendszereket használnak újabban a légifényképezést végző
repülőgépeken is, melyekkel nem csak a vetítési középpont koordinátáit
határozzák meg, hanem négy kiegészítő antenna segítségével, a repülőgép
tengelyei körüli elfordulások közelítő értékeit is mérni tudják.
A működési elv alapján történő osztályozás két
főcsoportja a pseudo távolságot mérő és a fázis mérő
GPS vevők. Az első csoportot tovább bonthatjuk a szerint, hogy csak a C/A
kódot vagy a P kódot is mérik. A további finomságokat a hardver és a
szoftver teljesítmény jellemzői vagy más szóval műszaki paraméterei határozzák
meg.
Csak néhány műszaki paramétert szeretnénk megemlíteni, mivel
el szeretnénk kerülni hogy a sok paraméter elterelje a figyelmünket a
lényegről.
- A
vehető rendszerek száma A GPS vevők közül
egyelőre egyedül az ASHTECH készülékek képesek arra, hogy
egyidejűleg vegyék mind a GPS mind a GLONASS jeleit, s
ezzel nem csak az SA
okozta hibákat képesek kiszűrni, de normális körülmények között is
megduplázzák az észlelések megbízhatóságát.
·
A vehető frekvenciák száma Ha a rendszerünket pontos vagy jelen idejű fázismérésre akarjuk
használni, úgy a vevőnek alkalmasnak kell lennie, mind az L1 mind az L2
frekvencia vételére. Az ilyen vevőket kétfrekvenciás vevőknek hívják.
·
A differenciális korrekciók
létrehozása, adása, vétele és felhasználása Ha
nincs a munkaterületen nyilvános rádióadón sugárzott differenciális korrekció
szolgáltatás, úgy saját master állomással kell rendelkeznünk, mely képes
a korrekciós jeleket kiszámolni, az RTCM SC-104 szerint bekódolni és rádióadón
a rover felé kisugározni. Ha maximális pontosságra törekszünk, úgy a masternek
rendelkeznie kell a Narrow Correlator és a MET technikai
megoldásokkal.
Akár van nyilvános adás akár nincs
a rovernek rendelkeznie kell rádióvevővel, dekódolóval és olyan
szoftverrel, mely a korrekciós jeleket figyelembe veszi a jelen idejű
koordináta számítás során. Nyilvános adás esetén ezen kívül még a szolgáltató
kódkártyájára is szükség lehet (ha az adás nem ingyenes).
- Csatorna
szám és OTF A pontmeghatározó GPS vevőknek egyidejűleg
több műholdat kell észlelnie (azaz több csatornásnak kell lennie). A
jobb vevők 8 vagy annál több csatornával rendelkeznek.
A röptében való inicializáláshoz
megfelelő szoftver mellett arra is szükség van, hogy a rendszer mind az L1,
mind az L2 frekvenciát mérje.
A fejezet végén szóljunk néhány szót a műszergyártó
cégekről is.
Sok hagyományos geodéziai műszergyártó pld. a Leica,
Topcon, Sokkia, Geotronics, stb. is gyárt GPS vevőt, mégis a geomatikai
gyakorlatban azoknak a cégeknek a termékei terjedtek el, melyeket a
műszerosztályok bemutatásakor megemlítettünk:
