Dr. Sárközy Ferenc: Térinformatika
Műholdas helymeghatározás I
Ebben a részben megismerkedünk
- a műholdas helymeghatározás geometriai alapelvével,
- a GPS és GLONASS rendszer felépítésével,
- a kódfázis és
- vivőfázis mérés fogalmával, valamint
- a GPS és GLONASS hibaforrásaival.
Amint az az alpont címéből is következik több műholdas
helymeghatározó rendszer is létezik illetve létezett, s a jövő tervek hasonlóképpen
gazdagok új műholdas megoldásokban.
A jelenlegi szabatos műholdas helymeghatározó rendszerek
közvetlen előzménye az USA Haditengerészete számára 1961-ben kifejlesztett TRANSIT
műholdas navigációs rendszer, mely polgári felhasználása 1967-ben kezdődött, s
1994-ben a rendszer működésével együtt véget is ért.
A rendszer alapvető célja tengerészeti navigáció volt, de
hasznosították geodéziai célokra is, elsősorban olyan globális feladatok
megoldására, mint a NAD 83 nevű északamerikai, vagy
a WGS 84 nevű globális dátum létrehozása. A TRANSIT
rendszer geodéziai hasznosítását hosszú észlelési idő, utófeldolgozás és
viszonylag alacsony, 1 m. körüli pontosságok jellemezték. A TRANSIT
rendszerben a mérés alapelve az volt, hogy a vevő a földi pont és a műhold
távolságának megváltozását határozta meg egy megadott időintervallumra a
Doppler csúszások segítségével (lsd. [5]), ezért ezekre a
műholdakra a geodéták rendszerint 'doppleres' jelzővel hivatkoztak. A TRANSIT-tal
egyidejűleg a Szovjetunióban is kifejlesztettek egy műholdas navigációs
rendszert, ezt azonban kizárólag katonai célokra használták és titokvédelmi
okokból jellemzőit nem publikálták.
Mind a jelenleg működő, mind pedig a tervezettek között
találunk olyan kispontosságú rendszereket, melyek helyzeti pontossága néhány
száz métertől egy-két kilométerig terjed. Ezek a rendszerek a korábbi
repülőgépes illetve hajós impulzusos rádionavigációs rendszerek (SHORAN,
HIRAN stb.) műholdas továbbfejlesztései. Ilyen rendszer pld. az ARGOS,
mely két TIROS N meteorológiai műholdat használ az állatok
helyváltoztatásának tanulmányozására. Az állatokra kb. 2 kg. súlyú rádióadót
erősítenek, mely 401.650 MHz frekvencián sugároz. a műholdak veszik a jelet és
továbbsugározzák a földi feldolgozó állomásra. A feldolgozó állomás a keresett
koordinátákat egy hold vételéből vezeti le mozgó tárgyak esetében ą800 m.,
rögzített tárgyak esetében pedig ą300 m. középhibával.
A számtalan új kezdeményezés közül csak megemlítjük az
intelligens autónavigációs rendszerekben fölhasználásra tervezett LORAN C
repülőgép navigációs rendszert, mely mérőelemei két alacsony pályamagasságú úgy
nevezett LEO szatellitán illetve a mozgó gépkocsin helyezkednek el, az
eredmények (a gépkocsik koordinátái) pedig a műhold kommunikációs csatornáján
keresztül jutnak a földi állomásra. A rendszer egy variánsát a GEOSTAR
távközlési szatellita segítségével próbálták ki 1993-ban.
A fenti áttekintés azt kívánta bemutatni, hogy már jelenleg is
többféle műholdas rendszer használható különböző pontossági és szolgáltatási
paraméterrel, és ez a jövőben a műholdas távközlés fejlődésével
még inkább így lesz. Egyre több ugyanis az olyan feladat, amelyben a mérés
eredményét nem a mért objektumon, hanem attól távol kívánjuk jelen időben
megkapni. Ha a pontossági igények nem túl nagyok, az ellenőrzött objektumok
száma pedig igen nagy, úgy olcsóbb lehet az ilyen feladatokat olyan saját szatellita
rendszerrel megoldani, mely egyben az adatátvitelt is elvégzi.
A korszerű műholdas
helymeghatározó rendszerek a pontok helyzetét térbeli ívmetszéssel határozzák
meg.
|
|
3.89 ábra - egy
távolság mértani helye a gömb
|
|
|
|
3.90 ábra - két
gömb metszésvonala kör
|
|
|
|
3.91 ábra három
gömb két pontban metszi egymást
|
|
Képzeljük el, hogy egy rögzített pillanatban
megmértük álláspontunk és egy műhold távolságát. Legyen ez a távolság 20 000
km. Egy mérés alapján álláspontunkról csak azt tudhatjuk, hogy valahol azon a
gömbön van amelyet a kérdéses műholdra mint középpontra 20 000 km.-es sugárral
szerkesztünk (3.89 ábra).
Ugyanebben az időpillanatban mérjük meg a
távolságunkat egy másik műholdtól is. Legyen ez a távolság 21 800 km.
Kézenfekvő, hogy álláspontunk rajta van azon a gömbön is, melyet a második
műhold mint középpont körül 21 800 km.-es sugárral szerkeszthetünk. Mivel az
álláspontunk mindkét gömbön rajta van rajta kell, hogy legyen a két gömb
metszésvonalaként létrejött körön (3.90 ábra).
Ha ugyanebben a pillanatban egy harmadik
műholdtól is megmérjük a távolságot, legyen ez 23 600 km. és elképzeljük a
harmadik gömböt is, úgy ez utóbbi két pontban metszi az első és második gömb
metszésvonalát. A két pont közül a valódi álláspont további mérés nélkül
néhány egyszerű szabály figyelembe vételével meghatározható (3.91 ábra).
Nem szabad elfelejtenünk, hogy a fenti gondolat-kísérletnél a
három mérést egy időpillanatban hajtottuk végre és ismertnek tételeztük fel
ebben az időpillanatban mind a három műhold koordinátáit.
A továbbiakban azonban a világszerte elterjedt GPS rendszerrel
fogunk foglalkozni, Mielőtt azonban ezt megtennénk szólnunk kell arról, hogy a
GPS-hez hasonló rendszer üzembeállítását a Szovjetunióban is megkezdték,
azonban a Szovjetunió tönkretétele után a kiépítés üteme lelassult. A
későbbiekben ismertetendő 'szelektív hozzáférés' fedőnevet viselő amerikai
politika miatt azonban az amerikai civilek is szeretnének egy olyan kiegészítő
mérőrendszerre támaszkodni, mely adatait nem hamisítják mesterségesen. Ezzel
magyarázható, hogy az amerikaiak által GLONASS-nak nevezett
szovjet (orosz) műholdas szabatos navigációs rendszer teljessé tételére az
amerikai üzleti körök pénzügyi támogatást ajánlottak fel az orosz kormánynak,
és amerikai cégek olyan vevők készítését kezdték meg, melyek a méréshez mind a
GPS mind a GLONASS műholdak jeleit felhasználják. 1993-ban 13 műhold üzemelt a
tervezett 21 működő és 3 tartalék, összesen 24 műholdból, melyek három
pályasíkban keringenek 19.1 km.-es közepes magasságban. Hozzá kell még fűznünk,
hogy a két rendszer összekapcsolása azért is előnyös, mivel a két rendszer
műholdjai olyan pályákon keringenek, melyek kiegészítik egymást, és
biztosítják, hogy a föld minden pontján minden időben kellő számú, optimális
helyzetű műholdat lehessen észlelni.
|
A GPS fejlesztésének megkezdését 1972-ben
kezdeményezte az Egyesült Államok Védelmi Minisztériuma (US. Department of
Defense, röviden DoD). Olyan rendszert szándékoztak megvalósítani mely a
szatelliták ismert pozícióiból távolságokat határoz meg ismeretlen helyzetű
földi, légi, tengeri objektumokra. Elsődlegesen a rendszer létrehozása
katonai célokból történt, de a polgári hasznosítással is számoltak.
A rendszer ürszegmense 21 aktív és 3 tartalék
műholdból áll, melyek hat darab 55o inklinációjú sikban helyezkednek el.
Mind a 6 sikban négy műhold kering 20 200 km. magasan közel kör alakú pályán.
|
|
|
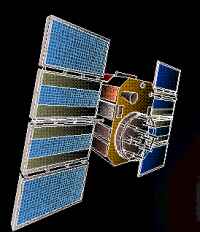
3.92 ábra - a
GPS műhold
|
A pályákat úgy képzelhetjük el, hogy az
egyenlítőt hosszúság szerint 30o-ként felosztjuk, majd minden egymástól
180 fokra fekvő két osztásponton keresztül fektetünk egy olyan körlapot, mely
középpontja egybeesik a föld középpontjával, sugara 26 370 km., s az
egyenlítő síkjával bezárt hajlásszöge 55o. A műholdak súlya
mintegy 750 kg. Ma, a rendszer teljes kiépülése után a föld bármely pontjáról
egyszerre 4-8 műhold 'látható' 15o-ot meghaladó magassági szög alatt. A
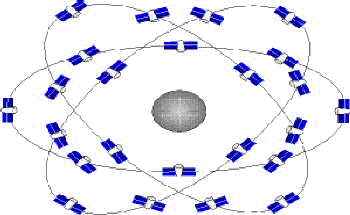
3.93 és 3.94 ábrán felvázoltuk a GPS és a GLONASS rendszerek pályáit és a
műholdak elhelyezkedését a pályákon.
|
|
|
|
3.93 ábra - a GPS
pálya síkok és a műholdak helyzete a pályákon
|
3.94 ábra - a
GLONASS pálya síkok és a műholdak helyzete a pályákon
|
Az első GLONASS műholdat 1982 októberében lőtték fel.
1995 végéig több mint 70 műhold került a pályára. A műholdak súlya mintegy 1500
kg., tervezett működési ideje 3 év. A tervek szerint az 1998-tól kezdődően
felbocsátandó műholdak tervezett működési ideje 5 év lesz.
A teljes kiépítésben a 24 darab GLONASS műhold 19 100
km.-es közel kör alakú pályán kering három pálya síkban, melyek felszálló ága
egymástól 120o-ra helyezkedik el. A pályánként 8 műhold egyenlő távolságra van
egymástól, szélesség szerinti attribútum különbségük 45o. A pálya
inklinációja 64.8o, egy teljes pálya megtétele kb. 11 óra 15 percig tart. A műholdak
pályáját úgy tervezték meg, hogy egyszerre legalább 5 holdat lásson a
felhasználó.
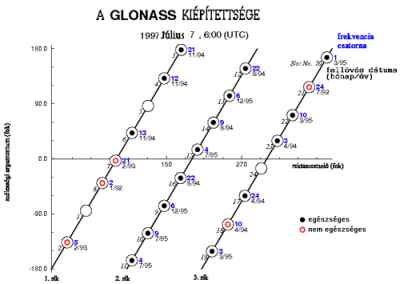
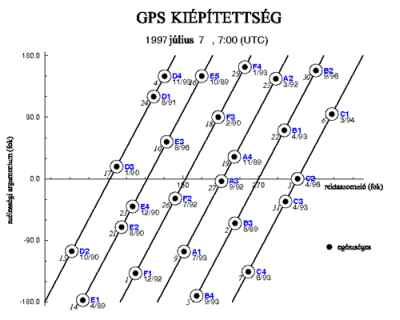
A 3.95 ábrán bemutatjuk a GLONASS rendszer 1997 július
7.-ei készültségi állapotát.
|
|
3.95 ábra - a
GLONASS rendszer kiépítettsége 1997 07 07
|
|
|
3.96 ábra - a GPS
rendszer kiépítettsége 1997 07 07
|
A GPS rendszerről
készült hasonló készenléti ábra (3.96 ábra) tanulsága szerint pillanatnyilag a GPS
a teljes kiépítettség állapotában van.
|
|
3.97 ábra - a GPS
műholdak által sugárzott jelek
|
|
|
A GPS műholdak két jelet sugároznak. Az első jel vivőhullám
hossza L1=1575.42 MHz., a másodiké L2=1227.60 MHz. E
frekvenciákat a nagypontosságú atomórával stabilizált 10.23 MHz-es alapfrekvencia
sokszorozásával állítják elő. Mindkét vivőhullámot modulálják a körülbelül 30
méter hullámhosszú P kóddal (P a precision - szabatos rövidítése). Az
L1 vivőt ezen kívül modulálják még a C/A (coarse/acquisition -
durva/elérés) kóddal, mely kb. 300 m. hosszú (3.97 ábra). A vevő ezeknek
a kódoknak a felhasználásával határozza meg a pseudotávolságokat.
A P kód
nagyobb, a C/A kód kisebb pontosságot biztosít a pseudotávolságok
meghatározásában.
Az
eredeti katonai célokkal összhangban a DoD a szelektív elérhetőség
(selective availability, röviden SA) politikáját gyakorolja, ami azt
jelenti hogy esetenként (pld. az öbölháború idején) korlátozza a teljes
rendszer használatát a polgári alkalmazóknak.
Gyakorlatilag
ez korábban úgy történt, hogy csonkolták azokat az üzeneteket, melyek a műhold
koordinátáit továbbítják a vevőknek. Jelenleg, időnként a C/A kódra
műholdanként változó, alacsony frekvenciás (hosszú idő alatt ismétlődő)
torzítást visznek, mely az eredeti 30 m-es pontosságot 100 m. körülire
csökkenti.
A
közeljövőben emellett tervezik az úgynevezett 'átejtés' kivédő (anti-spoofing)
tehnika bevezetését, ami tulajdonképpen azt jelenti, hogy az új P kódhoz (Y
kód) és a P kóddal modulált vivőhullámokhoz is csak a DoD által
terjesztett hardver kulccsal lehet hozzáférni.
A
tervek szerint 2000-ben állítólag meg fogják vizsgálni, hogy továbbra is
szükség van-e az SA-ra.
A GPS a WGS-84 referencia rendszert használja. A
műholdak pillanatnyi, időponttal jelölt koordinátái a navigációs üzenetben foglalnak
helyet, melyet mind a P mind a C/A kód tartalmaz. Természetes,
hogy az eredeti feldolgozás a GPS saját referencia rendszerében
történik. Ha más referencia rendszerben dolgozunk, és Magyarországon ez az
általános eset, úgy a mérési eredményeket transzformálni
kell a használt referencia rendszerbe. Erre akkor van lehetőség, ha a
méréssel érintett területen vagy annak közelében legalább 3 olyan alappontunk
van, melyek koordinátái mindkét rendszerben ismertek. Sok országban, így
nemsokára hazánkban is, a transzformációs paramétereket az országos geodéziai
szolgálatok biztosítják a felhasználók számára.
A GLONASS rendszer műholdjai szintén két jelet
sugároznak folyamatosan: az SP szabványos pontosságú jel a HP pedig
nagy pontosságú. A polgári felhasználók számára csak az SP
hozzáférés engedélyezett, ezt azonban nem rontják el mesterségesen. Az SP
L1 vivőfrekvenciája a műholdak számára egyedi és az L1 = 1602 MHz + n
* 0.5625 MHz képletből számolható, ahol n a műhold sorszáma. A 3.95 ábra
tanulsága szerint egyszerre több azonos sorszámú műhold is működhet (pld. a
6-os vagy 24-es) ezek azonban úgy helyezkednek el, hogy egy álláspontból
egyszerre ne legyenek láthatók. A GLONASS jel is tartalmaz navigációs és
rendszer üzenetet.
A GLONASS rendszer a PZ-90 geocentrikus, földhöz
kapcsolt referencia rendszerben működik és az a=6378136 m., f=1:298.257839303
paraméterű földi ellipszoidot használja. Jelenleg még nem ismert végleges
transzformáció a PZ-90 és a WGS-84 között.
A 3.97 ábrán láttuk, hogy a GPS az úgynevezett C/A
kóddal csak az L1 vivőt modulálja, míg a P kód és a navigációs
üzenet mindkét vivőre rákerül. Mivel a P kód titkosság alóli
felszabadítására nincs remény, a kódfázismérés megismerésekor a C/A kód
felhasználására fordítjuk a figyelmünk.
|

|
3.98 ábra - a C/A pseudo véletlen kód részlete
|
|
A C/A kód úgynevezett pseudo véletlen kód (bár
meghatározott szabályok szerint készül mégis úgy néz ki mintha zaj lenne),
zérusok és egyesek egymásutánja, egy elem frekvenciája 1.023 MHz, a kód 1023
bit hosszú, ami időben kifejezve 1 milliszekundumnak (0.001 mp.-nek) felel
meg. Egy elem hossza tehát
2.99792458*108*0.977517106*10-6=293.052 m., az egész kódsorozat pedig hosszban kifejezve
293.052*1023=299792.458 m.
|
Míg a GLONASSrendszerben a vivő frekvenciát, addig a GPS
rendszerben a C/A kódot rendelik a műholdakhoz, azaz minden műhold más és más
szabály szerint készíti a pseudo véletlen kódot. A 3.99 ábra bemutatja a kód
egy részének illusztrációját mind a 32 műholdra. A sorok fentről kezdődő
sorszáma megfelel a műhold azonosítójának, a sötét bitek az egyeseket, a
világosok a zérusokat reprezentálják.

3.99 ábra - 32 GPS
műhold C/A kódjának részletei
A C/A kódot azonban nem csak a műholdak generálják, hanem a
vevők is minden milliszekundum kezdetén. Ha az adó órája és a vevő órája
pontosan ugyanúgy járna, akkor a vett jel és a vevő jele közti fáziseltolódás
kizárólag a műholdról kibocsátott jel terjedési idejétől függne.
|
A 3.100. ábrán kék színnel ábrázoltuk a vevő
által gyártott kódot, pirossal pedig a vett demodulált jelet. Mivel egy
impulzus bit időben kifejezett értéke 0.977517106*10-6 másodperc, az
ábrán látható érték 19*0.977517106*10-6 másodperc, ami
5567.993 m-nek felel meg.
|
|
|
3.100 ábra - a
vett és a vevő által generált C/A kód időkülönbsége
|
A figyelmes olvasónak feltűnhet, hogy miként
lehet egy egészében 299.792 km-es kóddal több mint 22 000 km-es távolságokat
megmérni. Bár erre vonatkozó információt a GPS oktató irodalomban nem igen
találunk, a megoldást rendszerint úgy kapják meg a szoftverek, hogy
figyelembe veszik az álláspont közelítő koordinátáit (amit az előzőleg mért
álláspont koordinátáival vesznek azonosnak) és kiszámolják, hogy az előző
álláspont és a műholdak aktuális helyzete közötti távolságokban hányszor volt
meg a 299792.458 méternyi teljes kódhossz. Az így kapott értékeket ezután
érvényesnek tekintik az új álláspontra is.
|
A vevők tehát megmérik a szatelliták távolságát és kiolvassák
a kódolt információból a műholdak helyzetére vonatkozó adatokat. Geometriai
szempontból az álláspont ismeretlen koordinátái akkor számíthatók, ha ezek a
mérések illetve helyzeti információk egyidejűleg három műholdra rendelkezésre
állnak.
A mért távolságokat azért nevezik pseudo távolságoknak,
mivel értéküket a vevő órájának a műhold órájához viszonyított késése is
befolyásolja. A műholdakon nagypontosságú atomórák vannak, melyek
szinkronizálásával a földi irányító központ foglalkozik. A vevőkbe ugyanakkor
gazdaságtalan lenne ilyen drága atomórákat beépíteni, arról nem is beszélve,
hogy központi szinkronizálásukat sem lehet technikailag megoldani. Az
ismeretlen óra késést egy negyedik műholdra végzettt méréssel lehet
meghatározni.
A pseudo távolságok meghatározása történhet a kódok
felhasználásával. Az esetek többségében a vevők a C/A kódot értékelik ki a korrelációs
technika segítségével. A korreláció alapelve azonos
azzal amit az automatizált fotogrammetriai kiértékeléssel kapcsolatban már
megismertünk, áramköri megvalósítása azonban olyan, hogy biztosítja a
szatellita jel mindhárom komponensét: a műhold óra leolvasását, a navigációs
üzenetet és a moduláció nélküli vivőhullámot. Míg a két utóbbi minősége
független a megfejtett kódtól, addig az időleolvasás pontossága függ a kód
periódusától (hosszától). A periódusnak a C/A kód esetén amint láttuk kb. 300
m. távolság felelt meg, míg a katonai használatú P kód esetén 30 m. A
szatellita órajelét 1% pontossággal lehet detektálni ezért ideális esetben a
C/A kód alkalmazásával végzett pseudo távolság mérések 3 m., a P kód
segítségével végzettek pedig 0.3 m.-es pontossággal rendelkeznek.
A kódokat és jeleket a GPS az L1 és L2
ferkvenciák modulálásával juttatja el a vevőkhöz. Ezek a frekvenciák
természetszerüleg sokkal magasabbak a kódok frekvenciájánál. Míg a pontosabb P
kód hullámhossza 30 m., addig az L1 vivő 1575.42 MHz frekvenciája 19
cm.-nek felel meg.
A vivő fázis mérésre kialakított vevők áramkörei képesek a
kódolás mentes vivő hullámhossz helyreállítására és meg tudják mérni a vivő
fázisát is, azaz meg tudják határozni, hogy a vevő és műhold közötti teljes
távolságban az utolsó nem teljes vivő hullám hanyad része az egész 19
cm.-es hullámnak. A probléma 'csak' az, hogy a mért hosszban százmillió körüli
jelöletlen egész hullám is található, melyek megszámolása direkt módon
technikailag lehetetlen.
Az egész hullámhosszak meghatározásához a vevők hardveresen
annyiban tudnak hozzájárulni, hogy rögzíteni tudják az egyes műholdakra
vonatkozó teljes hullámhosszak változását. Ha ugyanis a vevő mozdulatlanul áll
az állásponton és méri négy műhold távolságát, a műholdak mozgása következtében
a távolságok (a teljes hullámok száma és a nem teljes hullám részek nagyságai
azaz a fázis mérési eredmények) változni fognak. Ezek a változások rögzíthetők
és tárolhatók.
Ahhoz hogy a feladatot jobban el tudjuk képzelni írjuk fel az
észlelések és a kordináták közötti összefüggést kissé egyszerűsített formában.
Jelölje az i index a műholdakat, a j index az észlelési
alkalmakat, fekete szín az ismert állandókat, piros szín az ismeretleneket,
zöld szín a mérési eredményeket, lila szín a navigációs űzenetből nyerhető
műhold koordinátákat.
Alkalmazzuk a következő jelöléseket:
- x, y, z - az álláspont koordinátái;
- Xij, Yij, Zij - az i-ik műhold koordinátái a j-ik észlelési
pillanatban;
- h - a vivő hullámhossza;
- c - a hullám terjedési sebessége;
- Ni - a teljes hullámhosszak száma
az i-ik műholdhoz a kezdő pillanatban;
- dfij - a nem teljes hullám
rész hossz (a teljes hullámot egységnek tekintve) az i-ik műholdra
végzett észlelés során a j-ik időpontban;
- dNij - a teljes
hullámhosszak számának változása az i-ik műholdhoz a j-ik
pillanatban a kezdő pillanathoz képest;
- deltaj a vevő órájának eltérése a GPS
időhöz képest a j-ik időpillanatban.
Egy észlelésre és egy műholdra tehát az alábbi összefüggés
írható fel az álláspont és műhold távolságára:
|
[(x - Xij)2 + (y - Yij)2 + (z - Zij)2]0.5
|
=
|
(Ni + dNij + dfij).h + deltaj.c
|
|
Készítsünk egy táblázatot, melyben
feltüntetjük az észlelési alkalmak számát a megfelő ismeretlen és egyenlet
számot, feltételezve hogy egyidejűleg mindíg négy műhold távolságát
mérjük. Nem nehéz észrevennünk, hogy három észlelés esetén, már nagyobb az
egyenletek száma mint az ismeretleneké, tehát az ismeretlenek kiegyenlítéssel
meghatározhatók.
|
|
észlelési alkalmak száma
|
1
|
2
|
3
|
|
ismeretlenek száma
|
3+4+1=8
|
3+4+2=9
|
3+4+3=10
|
|
egyenletek száma
|
4
|
8
|
12
|
|
A gyakorlatban a vivő fázismérésen alapuló módszerek
rendszerint két GPS vevőt alkalmaznak. A cél ezeknél a módszereknél az úgy
nevezett relatív helymeghatározás. A relatív helymeghatározás azt
jelenti, hogy két pont közötti távolság X, Y, Z komponenseit kivánjuk
meghatározni.
Az egyik vevőt az ismert referencia ponton üzemeltetik, míg a
másik vevő a meghatározandó ponton üzemel. Mindkét vevő a megadott programnak
megfelelően megméri a kijelölt műholdakra a vivő fázist és rögzíti a
hozzátartozó idővel együtt. A feldolgozási folyamatban (utófeldolgozásról van
szó) a program a vivőfázis észlelések különbségeiből számolja a
keresett koordináta különbségeket.
Megkülönböztetik az egyszeres, kétszeres és háromszoros
különbségeket (differenciákat).
Az egyszeres differenciák esetén az A
referencia és B meghatározandó ponton azonos időben azonos
műholdra végzett fázismérések eredményeit kivonják egymásból, ezért az i
és j indexektől eltekinthetünk és ha a vevők és szatelliták távolságát TA-val és TB-vel jelöljük
(azaz
TA = [(xA - Xi)2 + (yA - Yi)2 + (zA - Zi)2]0.5, stb. észlelési
egyenletként a következő kifejezést kapjuk:
TB - TA = (NB - NA + dfB - dfA).h + (deltaB - deltaA).c
Mivel a relatív helymeghatározásban a kiinduló pont
koordinátáit ismertnek tételezik fel, egy fenti egyenlet három koordináta
ismeretlent, szatellitánként egy (azaz ni) egészhullámszám
ismeretlent és mérési alkalmanként (nt) egy óra eltérési
ismeretlent tartalmaz. Azaz a megoldhatósághoz az
ni.nt mérési egyenletszámanak nagyobbnak kell lennie mint 3 + ni + nt.
Ha például 5 műholdra végzünk két alkalommal mérést , úgy 5 *
2= 3 + 5 +2 = 10, azaz a rendszer éppen megoldható.
A kétszeres kölönbségek azt a
mérési elrendezést modellezik, amikor ugyanabban az időben két szatellitára (j
és k) végezzük a szimultán mérést az A és B
pontokon, képezzük az előzőek szerint az egyszeres különbségeket majd kivonjuk
öket egymásból:
TBk - TBj - TAk + TAj = (NBk - NBj - NAk + NAj + dfBk - dfBj - dfAk + dfAj).h
Megfigyelhetjük a modellnek azt a nagy előnyét, hogy az
egyenletből kiesnek a vevők óra eltéréseit leíró ismeretlenek.
Ha itt is megvizsgáljuk a felírható egyenletek és ismeretlenek
számát, úgy azt találjuk, hogy mivel egy kétszeres különbség egyenlethez két
műhold szükséges, ni számú műhold esetén egy időpillanatban (epochában) (ni-1) egyenlet irható fel, nt epochában tehát a
felírható egyenletek száma (ni - 1)*nt. Az ismeretlenek száma pedig 3 koordináta ismeretlen és (ni - 1) egész hullámszám ismeretlen. Azaz négy műhold esetén (ni = 4) két észlelési időpontra (nt = 2) van legalább szükség, ugyanis (4 - 1)*2 = 3 + (4 - 1) = 6.
A háromszoros különbségek képzéséhez két időpontban (t1,t2) képezett
kétszeres különbségek különbségét képezik. Eredményként azt kapjuk, hogy
TBk(t2) - TBj(t2) - TAk(t2) + TAj(t2) - TBk(t1) + TBj(t1) + TAk(t1) - TAj(t1) =
(dfBk(t2) - dfBj(t2) - dfAk(t2) + dfAj(t2) - dfBk(t1) + dfBj(t1) + dfAk(t1) - dfAj(t1)).h
A háromszoros különbségek képzésének az a nagy előnye,
hogy amint a fönti egyenletből látható nem csak az óra javítások hiányoznak
belőle, hanem
kiküszöbölődtek az egész hullámok számát leíró ismeretlenek is, és ennek
következtében ez a modell érzéketlen az úgy nevezett 'ciklus csúszásokra', azaz arra a hibára ami az egész hullám számok változásának
meghatározásakor következhet be, ha a vevő valamely akadály következtében
ideiglenesen elveszti a kapcsolatot a műholddal.
A modell természetéből következik, hogy egy háromszoros
különbség egyenlethez két észlelési alkalomra van szükség. Következésképpen nt alkalom
esetén
(nt - 1) független észlelési időkombináció írható fel. ni számú műhold
esetén tehát az egyenletek száma (ni - 1)*(nt - 1) ennek kell nagyobb vagy egyenlőnek lenni
3-al a koordináta ismeretlenek számával. Ha 4 műholdra észlelünk, úgy az
észlelési alkalmak száma legalább 2 kell hogy legyen mivel (4 - 1)*(2 - 1) = 3.
|
A méréstechnikában, igy a geodéziai
mérésekben is megkülönböztetik a
- véletlen hibákat vagy zajt, a
- szabályos vagy szisztematikus hibákat és a
- durva hibákat.
A GPS hibái e három forrás kombinációjából jönnek
létre.
|
|
|
3.101 ábra - a
GPS hibaforrások hatása
|
|
A 3.101 ábra jól illusztrálja a három
hibatípus jellegét.
A zaj a valódi helyzet körüli szóródást idéz elő, végtelen
sok mérés esetén a mérések átlaga a valódi helyzetet szolgáltatná.
A szabályos hiba minden mérést egy irányba torzít, a mérési szám
növelésével az átlagban a torzítás értéke nem csökken.
A durva hiba a mérési pontosságot jelentősen meghaladja, szerencsére nem
lép föl rendszeresen és a mérési szám növelésével az eredményekből
kiszűrhető.
A véletlen hibák (zaj) főként a
pseudovéletlen kód kb. 1 méteres zajából és a vevő szintén kb. 1 méteres belső
zajából tevődnek össze.
-
A szabályos hibákat a szelektív hozzáférés
(SA) és más tényezők okozzák.
Ezek közül megemlítjük
- A műhold
órák azon hiba részét melyet a földi irányítóközpont nem
korrigál. Ez az érték elérheti az 1 m.-t.
- A
műhold sugárzott koordináta hibái szintén 1 m. körüli értékek.
- Az
atmoszféra alsó 8 - 13 km.-es tartományában a troposzférában
a jel terjedési sebessége függ az időjárási tényezőktől (hőmérséklet,
légnyomás, páranyomás). Ha ezeket nem mérik és nem veszik figyelembe a
számítás során, úgy 1 m.-es szabályos hibát okozhatnak.
- Az ionoszféra,
az atmoszféra 50 km.-től 500 km.-ig terjedő tartományának hatását a jel
terjedési sebességére különböző modellekkel próbálják figyelembe venni.
Mivel azonban ezek a modellek sem tökéletesek bizonyos esetekben 10 m.
körüli szabályos hibával terhelhetik a mérést.
- A GPS
jel nem csak közvetlenül a műholdról, de különböző tereptárgyakról visszaverődve
is bejuthat a vevőantennába. Mivel a visszavert jel hosszabb utat
tesz meg mint a közvetlenül terjedő ez szabályos hibát eredményez,
nagyságát 0.5 m.-re becsülhetjük.
- A durva
hibák több száz kilométeres eltéréseket is eredményezhetnek
- A földi
ellenőrző rendszer számítógépes vagy emberi hibái egy métertől több
száz kilométerig terjedő hibákat okozhatnak.
- A
felhasználók, főként a rossz dátum beállítással, 1 m.-től több száz
méterig terjedő eltéréseket idézhetnek elő.
- Ha a vevők
hardvere vagy szoftvere elromlik, tetszőleges nagyságú hiba
bekövetkezhet.
- Tipikus az
az eset, amikor a véletlen és szabályos hibák kombinációjaként minden a pontmeghatározásban
résztvevő szatellitára 15 m. körüli távmérési hiba adódik.
Eddig mérési hibákról
beszéltünk, a mért távolságokból azonban a bevezetőben vázolt geometriai elv
(három gömb metszése) felhasználásával koordinátákat akarunk meghatározni. Ha a
metsződő gömbök sugara hibás, úgy a koordináta meghatározás pontosságát
befolyásolja a pontról a műholdakra irányuló vektorok kölcsönös helyzete.
E geometriai hatás figyelemebe vételére a GPS-szel
foglalkozó szakterület a GDOP nevű mennyiséget használja. A GDOP betűszó
a Geometric Dilution of Precision (geometriai pontosság hígulás) angol
kifejezés rövidítése.
|
|
3.102 ábra -
rossz GDOP
|
|
|
|
3.103 ábra - jó
GDOP
|
|
Meghatározás szerint a
GDOP fordítva arányos a meghatározandó pontról a műholdakra menő irányok egységvektorai
által határolt gúla köbtartalmával.
Ha tehát a gúla
köbtartalma kicsi, következésképpen a GDOP nagy, a helymeghatározás pontossága
pedig alacsony (3.102 ábra). A fordított esetben, amikor a gúla köbtartalma
nagy, a GDOP pedig kicsi, a pontmeghatározás pontossága megnő (3.103 ábra).
Talán meggyőzőbb a hibák szóban történő kifejtésénél a mérési
eredmények grafikus ábrázolása. A következő három ábrát a MIT Lincoln
Laboratórium munkatársai készítették a közelmúltban készült méréseik alapján.
Az ábrákhoz összességében csak annyi magyarázatot kell hozzátenni, hogy a GDOP
felbontható vízszintes és magassági komponensre, az ábrákon szereplő HGDOP a
vízszintes komponens.
|
A 3.104 ábra nagyon jól illusztrálja a
véletlen hibák megjelenési formáját. Az ábrán jól követhető, hogy a kisebb tehát
pontosabb HGDOP-pal rendelkező, kékkel jelölt mérések nagyon jól tömörödnek
az elméleti ponthely környezetében.
Érdemes megfigyelni, hogy míg a vízszintes hiba 99%-os valószínűségi színten
59.2 m.-en belül van, addig a grafikusan fel nem tüntetett magassági hiba
ugyanezen a valószínűségi színten 104.1 m., azaz a vízszintes hibának majdnem
a kétszerese.
|
|
A 3.105 ábrán a GLONASS
mérési eredményeket vehetjük szemügyre. Az első figyelmet érdemlő tény, hogy a
25 GPS műholddal szemben az észlelési időpontban csak 16 GLONASS
műhold működött. Ennek következtében egyrészt jelentősen csökkent az 1-nél
kisebb HGDOP-pal rendelkező mérések száma, másrészt megjelentek a 2-nél nagyobb
HGDOP értékek is. Az ábra egyértelműen bizonyítja, hogy azonos HGDOP értékek esetén
a GLONASS mérések sokkal pontosabbak. Másik érdekes jelenség, hogy a GLONASS
magassági hibája nem tér el szignifikánsan a vízszintes hibától.
|
|
|
|
3.105 ábra - 1
perces GLONASS mérési minták pontossága
|
|
A 3.106 ábra az
optimális mérési módszer, a közös GPS - GLONASS mérések pontosságát
mutatja be. Az ábra legfőbb mondanivalója, hogy az esetek 97%-ában a HGDOP kisebb
volt egynél, azaz a két rendszer együttes konstellációja szinte minden időben
biztosítja az optimális geometriai elhelyezkedést az észlelt műholdak és az
álláspont között. Ennek megfelelően jelentősen nőtt a pontosság nem csak az
önálló GLONASS észleléshez képest, de az önálló GPS észleléshez
képest is. Különösen jelentős a magassági hiba csökkenése, mely kb. 80%-os a GPS
mérésekhez képest.
|
|
3.106 ábra - 1 perces
GPS és GLONAS közös mérési minták pontossága
|
|
|
Megjegyzéseit
E-mail-en várja a szerző: Dr Sárközy Ferenc