Dr. Sárközy Ferenc: Térinformatika
Ebben a részben megismerkedünk:
- A raszter-vektor átalakítással, ezen belül
- a korrekt mintavételezés feltételeivel (kompatibilitási
feltételekkel) ,
- az idomok határvonalának megkeresésével,
- vékony objektumok tengelyvonalainak meghatározásával
(objektumvékonyítással),
- a bináris váz vektorizálásával, az iveket alkotó pontok
ritkításával;
- a vektor-raszter konverzióval.
A térinformációs rendszerek szoftverjei a térbeli adatokkal
különböző műveleteket hajtanak végre. A műveletek egy jelentős részénél az
alfanumerikus illetve grafikus adatbázisokkal kapcsolatban már megismert
lekérdezési mechanizmusok egyszerű vagy összetett alkalmazásairól van szó. Más
feladatok ugyanakkor olyan geometriai illetve halmazműveletek végrehajtását
igénylik, melyekről a téma kapcsán még nem szóltunk. Ezeket az alapfeladatokat
a továbbiakban összhangban az angol és német terminologiával műveleti alapeszközöknek
fogjuk hívni.
Mielőtt azonban az alapeszközök tárgyalására rátérnénk külön
pontban foglalkoznunk kell a raszter - vektor, vektor - raszter
átalakítás témakörével. A nyolcvanas évek végéig a témát elsősorban a
szkannolással és digitális fotogrammetriával kapcsolatban tárgyalták (ezekre a
kérdésekre a harmadik fejezetben térünk ki). Napjainkban azonban egyre
jelentősebb szerepet játszik a hybrid adatmodellű GIS szoftver
koncepció, mely korrekt, egyértelmű raszter - vektor, vektor - raszter konverziók
nélkül nem képzelhető el. Ennek a koncepciónak az a lényege, hogy a térbeli
mőveleteket mindíg olyan modellben kell végrehajtani amelyikben egyszerűbb.
Példaképpen megemlíthetjük, hogy a fedvénymetszési műveletek (overlay) a
raszteres adatmodellel igen egyszerűen végezhetők, mig a vektormodellben igen
sok számítást és rendezést igényelnek, a távolság és kerületszámítások
ugyanakkor, pontosan és egyszerűen csak a vektoros adatmodellben hajthatók
végre.
A vektoros adatmodell minden esetben erősebb általánosítás
(generalizálás) eredménye mint a raszteres modell. Következésképpen az
semmilyen konverziótól sem várható el, hogy a vektor modellből helyreállítsa az
eredeti raszteres állományt. Az azonban igen, hogy ha egy vektoros modellben
tárolt poligont átalakítunk raszteres alakba, majd az így nyert raszterképet
vissza konvertáljuk vektoros adatokká a kiindulóval azonos poligont nyerjünk. A
fentiekből az is következik, hogy a vegyes adatmodellű GIS-ekben a képi (tehát
nem térképi) eredetű raszteres adatokat célszerű eredeti formátumukban is
tárolni.
Raszteres adatok digitális kamarákkal történő fényképezés,
mesterséges holdakról történő szkenneres felvételek, fényképek és térképek vagy
rajzok szkennelése (letapogatása) útján jöhetnek létre. A digitális kamarák, a
fényképek szkennelése és a fényképszerű szkennelés tónusos raszteres
adatmodellt eredményez, ami számítástechnikailag azt jelenti, hogy minden egyes
képelem (pixel) egyedi, adott határok közötti (egy vagy két byte-al leirható)
attribútummal, úgy nevezett szürkeségi értékkel rendelkezik. A szkennelt
térképek illetve rajzok rendszerint bináris képet szolgáltatnak, azaz a
letapogatott rajzi tartalom feketének, a háttér fehérnek tekinthető és egy bit
két értékével (0,1) jellemezhető. A tónusos képekkel végzendő egyes műveletekre
valamint arra a technológiára, amely a szkennelés eredményeként létrejött zajos
képekből szűrt bináris képeket állít elő a harmadik fejezetben még
visszatérünk. A jelen pontban a jobb érthetőség kedvéért kizárólag bináris
raszterképek vektorokká alakításával foglalkozunk.
Az analóg képek pixelekre bontása (diszkretizálása)
alapfeltétele a számítógépes grafika s ezen túl a számítógépes alakfelismerés
alkalmazhatóságának. Ez utóbbi feladatok alapkérdéseivel foglakozik Pavlidis
alapvető, 1982-ben megjelent monográfiája [7]. E könyv
eredményeit felhasználva igyekszünk bizonyítások nélkül összefoglalni a
diszkretizálással, ezen belül, a raszter-vektor, vektor-raszter átalakítással
kapcsolatos alapkérdéseket.
Mindenek előtt a szomszédság fogalmának bevezetésével
kell foglalkoznunk. Erre azért van szükségünk, mert valamilyen megfelelést kell
találnunk az analóg képen plauzibilis szomszédsági fogalomnak a pixelek
világában.
|
|
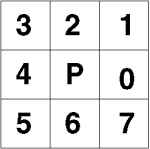
2.27 ábra - a P pixel és szomszédai
|
|
A 2.27
ábrán kilenc pixelt ábrázoltunk. A kérdéses (figyelembe vett) pixelt P-el
jelöltük, míg a mátrix többi elemét 0-7-ig terjedő nyolc számjeggyel.
Jelöljük e számjegyeket N-el, és nevezzük el a P-t körülvevő pixeleket a P-re
vonatkozó N-szomszédoknak. E szomszédok között különbséget tehetünk a
szerint, hogy N páros vagy páratlan. Páros N esetén a két pixel egy oldal
mentén találkozik ezt a szomsédságot d(irekt)-szomszédságnak
míg a páratlan N-el jelölt pixelek elhelyezkedését, melyek csak egy sarokponton
találkoznak P-el i(ndirekt)-szomszédságnak nevezzük.
|
A szomszédság fogalom felhasználásával a
pixelek bejárásához különböző típusú utakat határozhatunk meg. Ha nem kötjük
meg, hogy az egymást a bejárás során követő pixelek milyen típusú
szomszédságban legyenek csak azt, hogy szomszédok legyenek úgy i-útról
vagy egyszerűen csak útról beszélünk. Ha a bejárás egymás után következő
elemei d-szomszédok, úgy d-útról beszélünk. Egyszerű út
esetén a sorozat valamennyi pixele egyedi és nincs az úton belül kettőnél több d-szomszédja.
Zárt út esetén az első és utolsó pixel egybeesik.
Lényeges szerepet játszik az alakzatok
leírásában az összekapcsoltság fogalma. Azt mondjuk, hogy egy S
pixelhalmaz összekapcsolt ( vagy i-kapcsolt), ha minden C
és D pixelpárjához tartozik egy olya i-út, melynek kezdő és vég
eleme C és D és az összes többi eleme S része. Ha a
kérdéses pontok d-úttal kapcsolhatók össze, úgy a pixelhalmazt d-kapcsoltnak
nevezzük.
Ahhoz, hogy az analóg képet a diszkrét (pixeles) kép
kielégítően ábrázolja szükséges hogy a két kép topológiailag egyenértékű
legyen. A topológiai egyenértékűség, amint
arról már szóltunk, népszerűen fogalmazva azt jelenti, hogy a két alakzat nyújtással
és zsugorítással szakadás és vágás nélkül átvihető egymásba.
|
A
2.28-as ábrán bemutatunk egy eredeti képet, és az ábrán látható pixelmérettel
történő letapogatással nyert diszkrét képét. Igazolható, hogy a két kép
topológiailag ekvivalens, mégis egyszerű szemlélet alapján megállapíthatjuk,
hogy a raszteres kép hasonlósága az eredeti képhez a legtöbb gyakorlati
feladat szempontjából nem kielégítő.
|
|
|
2.28 ábra - a
topológiai hasonlóság hiánya az eredeti és diszkrét kép között
|
|
Ahhoz, hogy a topológia mellett az
eredeti kép alakját is megőrizzük jelentős mértékben csökkentenünk kell a
diszkrét kép pixel méretét, vagy ami ezzel egyenértékű, növelnünk kell a
letapogatás felbontását.
A fenti követelmények (topológia és
alak) akkor teljesíthetőek, ha a letapogató háló lukbősége h kompatibilis
az analóg képpel. A kompatibilitásnak az a feltétele, hogy létezzen egy olyan
távolság, mellyel alkotott C kör valamennyi R fekete tartomány
valamennyi határpontjához érintőként simul és teljes egészében benne van R-ben.
Ugyanez érvényes R kiegészítőjére is.
A fenti szigorú megfogalmazás
gyakorlatilag azt jelenti, hogy minél nagyobb a fekete (illetve fehér) folt
határának lokális görbülete, annál kisebb kell hogy legyen a raszter
hálóbősége. Ne felejtsük el, hogy a kompatibilitás szempontjából mértékadónak
valamennyi folt valamennyi határpontja közül a legnagyobb görbületű tekintendő.
Kétségtelen, hogy a kompatibilitási feltétel szigorú
megkötéseket tartalmaz a foltok szélességére s határvonalaik görbületére.
Térinformatikai szempontból különösen érzékeny megkötés, hogy nem engedi meg a
sarkokat. A
gyakorlatban ezen a nehézségen úgy tehetjük túl magunkat, hogy a sarkokat olyan
kis ívekkel helyettesítjük, melyek az igényelt felbontásban nem érzékelhetőek.
Sajnos ez a megoldás különösen kataszteri térképek szkannolásakor gazdaságosan
nem érvényesíthető. Ezért találunk e térképek raszteres változatain
következetesen íves telekhatár pontokat. Mivel a pixelméret túlzott csökkentése
napjainkban még gazdasági szempontból nem engedhető meg a keletkezett hibát a
vektorizálási folyamatban szakértői modulok alkalmazásával próbálják
megszüntetni.
Figyelemre méltó a felbontóképesség meghatározása azokban a
gyakorlati esetekben is amikor vektoros adatokat akarunk számszerűleg
(billentyűzetről vagy kézi digitalizálással) raszteres rendszerekbe bevinni.
Megfelelő eredményt csak akkor érhetünk el, ha a raszteres rendszer
alapszoftverje lehetővé teszi h beállítását a kompatibilitási
követelményeknek megfelelően.
Összefoglalva megállapítható, hogy a kompatibilitás
megléte biztosítja az analóg kép topológiájánk megőrzését a diszkrét képben, s
egyben biztosítja az alak megtartását is. Ez utóbbival kapcsolatban
figyelemreméltó az a bizonyítható megállapítás, hogy ebben az esetben az analóg
és a diszkrét kép két megfelelő pontjának távolsága nem lehet nagyobb mint d.
A szkennelt kép kisebb nagyobb kiterjedésű objektumokból áll.
A vektoros adatmodell ugyanakkor elméleti vonalakból építi fel objektumait. A
térképek különösen a kataszteri térképek látszólag szintén csak vonalakból
állnak. Ha célunk a raszteres modellből vektoros modellt előállítani, úgy meg
kell különböztetnünk a szkennelt kép kisebb nagyobb objektumai közül azokat,
melyek valóban területet kívánnak modellezni azoktól, melyek tulajdonképpen
vonalak és csak azért tűnnek területnek mivel az analóg térképen nem lehet
elméleti vonalat rajzolni, illetve olyan vonalas létesítmények, melyeket a
térképen szélességi kiterjedéssel is rendelkező egyezményes jelekkel
ábrázolunk, információs rendszerünkben azonban geometriai adatként csak
tengelyvonalukat kívánjuk tárolni, szélességüket egyéb tulajdonság jellemzőikkel
együtt külön adatbázisban szerepeltetjük.
A kétféle adattípust a képfeldolgozási irodalom is
megkülönbözteti: vastag régióknak és vékony vonalaknak nevezi
őket. Bármelyik adattípust is kívánjuk azonban feldolgozni mindenek előtt meg
kell határoznunk az objektum körvonalát (kontúrját).
Egy összetett objektum több belső szigetet is tartalmazhat.
Mielőtt rátérnénk e szigetek kontúrjainak meghatározására foglalkozzunk az
objektum egészét határoló körvonal meghatározásával. Az algoritmusnak, mint
általában, csak az alapgondolatát közöljük a részletek iránt érdeklődőknek a [7] 7. fejezetét alánjuk figyelmébe.
Függőleges vagy vízszintes letapogatással keressük meg az első
pixelt, melynek 4 irányú (a 2.27 ábra kódolása szerint) szomszédja nem tagja a
halmaznak. Mivel bináris képekről van szó ez azt jelenti hogy keresünk egy
olyan 1 értékű (tehát fekete) pixelt, melynek keleti (4 irányú) szomszédja 0
értékű (tehát fehér). A kiinduló pont megtalálása után megkeressük a következő
pixelt olymódon, hogy az a körbejárás haladási értelmétől leginkább jobb kéz
felé helyezkedjen el. Ezt az algoritmus úgy éri el, hogy az S iránykódot
a kezdeti 4-es értékből kiindulva szisztematikusan úgy változtatja, hogy az
első vizsgálandó pixel mindig a haladásnak megfelelő még elképzelhető
legjobboldalibb pixel legyen.
A fentieknek megfelelően az iránykódok a következőképpen
változnak: legyen S kiinduló értéke 6, az első keresést az S-1=5
irányba tehát a kiinduló pontból lehetséges első irányba végezzük mivel a 4-es
irányban, feltételeink szerint, nem lehet fekete pixel. Ha a keresésünk
eredményes volt (a kezdőponttól 5 irányban fekete pixelt találtunk) úgy ennek attribútum
értékét eggyel megnöveljük, koordinátáit (rendszerint lánckódját) beírjuk a
listába, és az alap keresési irány S értékét kettővel csökkentve (S:=S-2),
az eljárást előröl folytatjuk. Ha az S-1 irányban nem volt fekete pixel
úgy következőnek az S irányban keresünk, és ha eredményesen, úgy a pixel
kódját kiírjuk de S alapértékét nem változtatjuk meg és az eljárást előröl
folytatjuk. Ha nem jártunk eredménnyel, úgy az S+1 irányban folytatjuk a
keresést. Eredményesség esetén a pixel lánckódját kiírjuk, de S
alapértékét most sem változtatjuk meg és az eljárást előröl folytatjuk. Ha mind
ezideig nem találtunk új fekete pixelt, mely része a körvonalnak, úgy S
értékét 2-el megnöveljük (S:=S+2) és ezzel a kiinduló értékkel az
egész folyamatot megismételjük. Ha a folyamat háromszori ismétléssel sem vezet
eredményre (a kezdő pixelen kívül több fekete kontúr pixelt nem talált a
program), úgy a futást leállítjuk, mivel ez az eset akkor áll elő, ha egy
magányos pixel kontúrját keressük. Ellenkező esetben, ha tehát a listán
folyamatosan gyűlnek a körvonalat alkotó pixelek, a futás mindaddig
folytatódik, míg az utolsó megtalált pixel nem lesz azonos (koordinátái
alapján) a kezdő pixellel.
A keresés eredményeképpen rendelkezésünkre állnak a
kontúrpontok koordinátáiból és iránykódjaiból álló listák. Természetesen elég
csak a kezdőpont koordinátáit tárolni a többi koordináta szükség esetén ezekből
az értékekből meghatározható. Az eredeti pixelkép attribútum értékei is
módosultak mégpedig úgy, hogy azok a fekete pixelek, melyek a kontúr részeivé
váltak a fekete pixeleket jellemző 1 helyett 2 vagy annál nagyobb
attribútumokat kaptak. Mivel a keresés során minden határpontként figyelembe
vett pixel attribútumát a program a kiválasztás pillanatában eggyel megnöveli,
2-nél nagyobb attribútum értékekkel úgy találkozhatunk hogy egyes pixelek
többször is kiválasztásra kerültek a határ részeiként.
|
|
2.29 ábra -
többszörös pixelek
|
|
Ilyen
pixeleket úgynevezett többszörös pixeleket látunk a 2.29 ábrán.
Az
ábra tanúsága szerint a többszörös pixelek olyan vékony részletek
határleírására szolgálnak amelyek mindkét oldali határát ugyanazon pixelek
alkotják. A többszörös pixelek, mint arra később rámutatunk, fontos szerepet
játszanak a vékony vonalak tengelyeinek meghatározásában.
|
A tartomány valamennyi belső objektumának kontúrját a már
vázolt külső kontúr meghatározó programra és annak eredményeire támaszkodva
határozhatjuk meg.
Kiválasztunk a kezdőpontot követő fölülről lefelé haladó
határszakaszon egy pixelt (megelőző iránykódjai 4-7, követő iránykódjai 5-7),
ahonnan x (vízszintes) irányban pásztázni kezdjük a pixeleket. A vizsgálatba mindig
három egymás után lévő pixelt vonunk be. A belső luk kezdőpontját, alapesetben,
ott találja meg a program ahol a vizsgált három pixel közül az első két pixel
értéke 0 és 1. Ekkor az 1 értékű pixelt tekintve kiindulópontnak, a határvonal kereső
program megkeresi a belső luk határát ás hozzácsatolja a pixelek koordinátáit a
külső kontúr listájához. Ez lehetővé teszi, hogy a belső határpontokról is
indulhassanak pásztázások, melyek a még fel nem tárt belső lukakon belüli
szigetek határait is feltárják.
Bonyolultabb az eset akkor, ha a luk határa és a teljes
objektum határa egybeesik (a fehér lukat csak egy vékony fekete vonal választja
el a külső fehér háttértől). Ekkor már mind a három egymás utáni vizsgált pixel
attribútum értékét figyelembe kell venni a helyes döntéshez. A két határ
egybeesése akkor áll elő, ha az egymás utáni bitek 0,2,0 értékeket vesznek fel.
Abban az esetben ha a kérdéses bitkombináció 1,2,0 a pásztázás a globális
objektum határához ért és új kezdőpontból kiindulva kell folytatni a keresést.
Ugyanez a feladat akkor is ha a következő bitkombinációval találkozik a
program: 0,3,0. Ekkor ugyanis az alapobjektum egy a fehér háttérbe kinyúló
vékony "félszigetét" érte el a pásztázás, amely előtti és mögötti
fehér részek már a háttérhez tartoznak.
A raszteres ábrázolás során erősen torzulnak az euklideszi
geometria olyan hagyományos fogalmai mint a távolság, egyenes, metszéspont,
hisz két tetszőleges pixel közötti i-út nem azonos az analóg síkon két
pixelnek megfelelő pontok között húzható legrövidebb távolsággal, ha pedig két
különböző pixel pár közötti i-utak metszéspontját vizsgáljuk az
általában nem esik egy pixelre. Ezek a problémák világossá teszik, hogy ilyen
jellegű feladatokat célszerűbb az analóg teret geometriailag leképező vektor
modellben végrehajtani. A vektor modellt viszont csak akkor tudjuk létrehozni,
ha meghatározzuk, hogy mikor tekinthetünk egy pixel formációt vonalszerűnek. Az
egyik meghatározás szerint raszteres vonalábrázolásnak olyan pixel
halmaz tekinthető, melynek valamennyi pixele egyben a halmaz körvonalának is
része.
A raszter képek létrehozásakor az analóg képen vonalként
jelentkező objektumok azonban nem feltétlenül felelnek meg a fenti
meghatározásnak azaz a pixeles képen az eredeti vonalak teli objektumként is
jelentkezhetnek az eredeti vonal vastagság illetve a pixelméret függvényében.
Ahhoz, hogy az eltorzult vonalak vonalszerűségét a pixeltérben is
helyreállíthassuk célszerű volt bevezetnünk a többszörös pixelek
fogalmát.
A 2.30 ábrán szemléltetjük azokat a feltételeket, melyek közül
egy vagy több fennállása esetén a pixelt többszörösnek nevezzük.
|
|
2.30 ábra - a
többszörös pixelek létrejöttének feltételei
|
|
Többszörös a pixel ha:
- a körvonal kereső algoritmus többször is
kiválasztja (az ábra B pixele, amely akkor áll elő, ha két különálló
határív ugyanarra a pixelre képződik le);
- nincs szomszédja a tartomány belsejében (az
ábra A pixele, mely a határvonal visszahajlását ábrázolja);
- van legalább egy olyan d-szomszédja,
mely része a határvonalnak, de a határvonalat leíró útban nincs
közvetlenül a kérdéses pixel előtt vagy után (az ábra C és D
pixele, melyek különálló határíveket képeznek le egymás melletti
pixeleken).
|
A többszörös pixelek a határvonal meghatározó algoritmus
többszörös futtatásával szekvenciális futási módban egyszerűen meghatározhatók:
az első futás után az első feltételnek megfelelő pixelek értéke 2-nél nagyobb,
a második futtatás során kiválaszthatók a második és harmadik feltételt
kielégítő pixelek (nincs 1 értékű szomszédja illetve 2 vagy nagyobb értékű d-szomszéd
megléte, mely ugyanakkor nem szomszéd a határt leíró útban). Az irodalomban [7] több olyan párhuzamos feldolgozást biztosító kritérium
rendszert is találunk, ahol annak eldöntése, hogy valamely pixel többszörös-e
vagy sem a szomszédos 8 pixel által alkotott konfiguráció vizsgálatára
korlátozódik.
A vékonyítási algoritmusok alapgondolata az, hogy a
síkbeli objektumokat vázukkal (más szóval középtengelyükkel)
helyettesítjük, és hogy ez a váz a pixeltérben lehetőleg egy pixel vastag
legyen.
|
A
folytonos síkon a vázat azon körök középpontjainak egymásutánja határozza
meg, melyek teljes egészében benne vannak az objektumban, s melyeknél
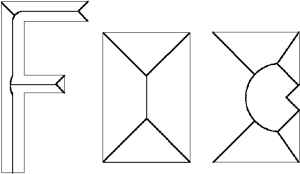
nagyobb, azonos középpontú köröket az objektum nem tartalmaz. Amennyiben az objektum határán lévő görbületi középpontban a
görbület szélső értéket vesz fel úgy a váznak létezik egy olyan ága, mely a
kérdéses pontban végződik. A 2.31 ábra tanúlsága szerint vékony objektumok
esetén (az ábra F betűje) a váz jól tükrözi az objektumok alakját, ugyanez a
vastag objektumokról nem mondható el. Ebből következik, hogy míg a vékony
objektumok vektoros leírására vázukból indulunk ki, addig a vastag objektumok
vektoros leírásához körvonalaikat használjuk fel.
|
|
|
2.31 ábra - síkidomok
vázai
|
|
A vékonyító algoritmus szempontjából a tengelypontokat
azonosnak vehetjük a többszörös pixelekkel, mivel ezek tulajdonképpen azok a
pixelek, melyek a vonalas objektum két határát egy, legfeljebb két pixelen
képezik le.
Az alap algoritmus szavakban a következőképpen fogalmazható
meg. Legyen R
az objektumot alkotó pixelek halmaza, B(R) a halmaz határa, M(R)
az R halmaz többszörös pixeleinek részhalmaza. Határozzuk meg a B(R)
halmazt olymódon, hogy minden olyan pixelt tartalmazzon, melynek d-szomszédja
van R-en kívül (azaz 0 értékű d-szomszédja van). Határozzuk meg
ezután M(R)-t, valamennyi határ pixelt mint lehetséges jelöltet
figyelembe véve, a párhuzamos feldolgozást lehetővé tevő 8 szomszédból álló
konfiguráció vizsgálata alapján.
Ha B(R)
megegyezik M(R)-el, azaz valamennyi határpixel egyben többszörös pixel
is, az alapfeladatot megoldottuk és a program leáll, ha nem R-et R-(B(R)-M(R))-el
helyettesítve megismételjük az eljárást (azaz elhagyjuk azokat a határpont
pixeleket, melyek nem többszörös pixelek és az így nyert redukált halmazon
megismételjük a műveleteket). Az ismétléseket addig folytatjuk, míg a határ
valamennyi pixele nem többszörös pixel.
Az így nyert alakzat általában 1, de helyenként 2 pixel
vastagságú is lehet, ezért egy következő szerkesztési lépésben gondoskodni kell
arról, hogy a váz két pixel vastag szakaszain az egyik (pld a 4 vagy 2 irányú,
más szóval nyugati vagy északi) pixelt töröljük, ha ez nem megy a folytonosság
rovására.
Az így nyert váz még nem vektor, hanem egy vékony vonalszerű
bináris kép. Ahhoz hogy a vektorizálás megtörténjen még két lépés hátra van. Az
első lépésben létre kell hoznunk a vékony bináris kép topológiáját. A topológia
létrehozásánál abból indulunk ki, hogy a vektoros modellben azokat a pontokat
nevezzük csomópontoknak, melyekben kettőtől eltérő számú vonal találkozik.
Feladatunk most már az, hogy analógiát találva a vonaltalálkozásra a vékony
bináris képen megkeressük a csomópontok pixeles megfelelőit és a közöttük
elhelyezkedő íveket leképező pixeleket.
Az analógia megtalálására az ad egyszerű lehetőséget, hogy a
bináris képünk egy pixel vastagságú, ami azzal egyenértékű, hogy azok a pixelek
lesznek a csomópontok megfelelői, melyeknek kettőnél több vagy kevesebb
szomszédjuk van .
|
|
|
|
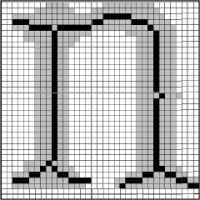
2.32 ábra -
szkennelt n betü vékonyítása
|
|
A 2.32
ábrán bemutatjuk egy "n" betü szkennelést követő vékonyítását
(vázkialakítását), valamint a topológia létrehozását a vázon. A szkennelt
pixeleket szürke, a váz pixeleket fekete kitöltéssel jelöltük (felső ábrarész),
a három felé elágazó csomópontokat a kezdőpontokat jelölő (egy elágazással
rendelkező) csomópontoktól az eltérő szürkeség árnyalat különbözteti meg (alsó
ábrarész). A közbenső (kétfelé elágazó) pontok fekete kitöltést kaptak.
|
Eljárásunk tehát az lehet, hogy valamilyen gráf bejáró
algoritmussal elkezdjük bejárni a pixeleket. Tetszőleges helyen (pld. a bal
felső pixelnél) kezdhetjük meg a vizsgálatot. Megnézzük, hogy hány szomszédja
van, ha csak kettő úgy tároljuk egy pufferban a koordinátáit, a veremben az
egyik szomszédja koordinátáit és hozzákezdünk a másik szomszéd vizsgálatához. A
folyamatot mindaddig folytatjuk amíg olyan pixelhez nem jutunk, melynek
kettőtől eltérő számú szomszédja van. Ha a szomszédok száma 1, úgy egy végcsomóponthoz
jutottunk. A pufferben lévő koordinátákhoz hozzáfűzve a külön is tárolt
végcsomópont koordinátáit egy rész ívet nyerünk.
Ezután előhívjuk a veremből a kezdő pont még nem vizsgált szomszédjának
a címét és a vizsgálatot onnan folytatjuk (vázolt eljárásunknál gondoskodni
kell arról, hogy a következő pontok koordinátái a pufferban az első vizsgált
pont elé kerüljenek, ha ezt a problémát meg akarjuk kerülni, úgy kezdőpontként
csomópontot kell választani).
Amint elérünk a következő kettőtől eltérő számú szomszéddal
rendelkező csomóponthoz koordinátáit hozzákapcsoljuk a pufferből kivett
koordináta sorozathoz és ezzel megkaptuk az első ívet a kezdő és vég
csomóponttal. Ezen a csomóponton verembe helyezzük az egyik kutatható irányt a
másik irányban pedig folytatjuk a bejárást az előbbiek szerint.
A bejárás eredményeképpen megkapjuk a vonalak kezdő, közbenső
és végponti koordinátáit. Ez a struktúra elvileg már vektor struktúra
gyakorlatilag azonban még szükség van az íveket alkotó pontok fogyasztására.
Bár az elmondott elvek alapján megszerkesztett programok már
jó egy évtizede működnek figyelemre méltó, hogy a legújabb térinformatikai
szakirodalom is egyre újabb és újabb programokról és program módosításokról
számol be. Ez a tény több okkal magyarázható, közülük csak a négy
legfontosabbra utalunk:
|
A 2.34
ábra esetében például az 1, 2 és 3 számmal jelölt pixelek megtartása lehetővé
teszi az Y illetve T torzulás kiküszöbölését.
|
A 2.34
ábrán a vékonyító algoritmus önkényes tájékozás választásának (az egy pixeles
szélességet eredményező törlésnél) hatására létrejövő Y és T jellegű
torzulásokat ábrázoltuk Drumond és szerzőtársai előadása alapján [9]. A hivatkozott szerzők előadásaikban arról számolnak
be, hogy milyen algoritmusokat dolgoztak ki illetve szándékoznak kidolgozni a
bemutatott hibák kiküszöbölésére.
|
A fentiekből
mindenesetre azt a következtetést mi is levonhatjuk, hogy a szkennelés
eredményeinek vektorizálását csak akkor lehet többé kevésbé egyértelműen
megvalósítani, ha szabványosítjuk az egyes térkép típusokhoz rendelhetően a szkennelési
technikát (pixelméret), és a vékonyító és vektorizáló algoritmusokat
(természetesen ugyanez vonatkozik a vektorizált pontok ritkitására is, amire a
későbbiekben még kitérünk).
Mivel a szekvenciális számítógépek alkalmazásának a egyre
nagyobb szerepe van a raszter-vektor átalakítás térinformatikai
felhasználásában az alábbiakban röviden összefoglaljuk Moore 1992-es
vektorizáló algoritmusát [10]. Megjegyezzük, hogy az
algoritmus lényegében csak annyiban tér el a már felvázolt gráf követő
algoritmustól, hogy szisztematikusan intézkedik az egész kép bejárásáról (a
korábbi algoritmus csak egy objektum megtalálásáig keresett szisztematikusan),
valamint hogy a végleges topológiát két lépcsőben alakítja ki.
|
64
01000000
|
128
10000000
|
1
00000001
|
|
32
00100000
|
vizsgált
pixel
|
2
00000010
|
|
16
00010000
|
8
00001000
|
4
00000100
|
|
2.35 ábra -
kódkialakítás Moore algoritmusában
|
|
A módszer első
lépcsőben soronként megvizsgálja a pixeleket és ha a pixel értéke 1 (fekete),
úgy a 8 szomszédja milyenségét figyelembe véve kialakít egy kódot (2.35 ábra)
mégpedig olymódon, hogy azoknak a szomszédoknak a kódját összeadja, melyek
feketék tehát valamely vonaldarabhoz tartoznak. A kód kialakítása után egy
szabálygyűjtemény megmondja, hogy az adott kódhoz a 16 szabály közül melyik
tartozik. Figyelembe kell ezenkívül még venni, hogy a négy előzőleg
feldolgozott pixel milyen vonalhoz tartozik. A szabályok megmondják hol kell
csomópontot csinálni, melyik vonalat kell lezárni, meghosszabbítani stb. A
végrehajtott szabályok illetve az "elődök" hovatartozása alapján
csomópont-vonal, vonal-csomópont listák készülnek a másodlagos vektorizálás
támogatására. A másodlagos vektorizálásra azért van szükség, mert a szabályok
alapján "álcsomópontok" is kialakulnak (olyan pontok, melyeknek
csak két elágazásuk van, tehát közönséges közbenső pontnak tekintendők). Maga
a folyamat tulajdonképpen egy gráf bejárás, a program végig megy minden
vonalon és megvizsgálja, hogy egy csomópont hány vonalban található meg. Ha a
csomópont két vonalban jelentkezik, úgy törli a csomópontot és a két vonalat
összekapcsolja.
|
A vektorizált pixelpontok azonban igen sűrűn vannak,
különösen, ha az eredetijükül szolgáló analóg vonalak egyenesek vagy szabályos
ívek voltak. A ritkításra szabálytalan görbék (pld. szintvonalak) esetében is
szükség van, azonban grafikus végtermék esetén, a sokszög vonalakat valamilyen
approximációs eljárással, rendszerint spline-okkal, még simítani szokták.
A közbenső pontok ritkításánál három szempontot kell
figyelembe vennünk: a kihagyandó pontok eltérése a helyettesítő egyenesüktől
nem haladhat meg egy megadott értéket, az eltérések előjele váltakozó kell hogy
legyen, az eredeti pontsor hossza a helyettesítő egyenes hosszánál nem lehet
sokkal nagyobb (gyakorlati tapasztalatok alapján, ha ez a viszony 1,1 vagy
kisebb a helyettesítés minden egyéb vizsgálat nélkül elvégezhető, ha a viszony
1,5 vagy nagyobb a helyettesítést el kell utasítani).
A poligon illesztő algoritmusok kis csoportokra bontják az
illesztendő pontokat (számuk csoportonként rendszerint 5-10) majd megvizsgálják
az előző bekezdés kritériumait (ha a vizsgált pont koordinátái xP, yP a vonalszakasz
kezdőpontjának koordinátái X,Y a vonalszakasz tengellyel bezárt szöge ľ,
úgy az eltérés m=(yP-Y)cosľ-(xP-X)sinľ ). Amennyiben a szakasz megfelelt a kolinearitási
feltételeknek úgy megkezdik a következő szakasz vizsgálatát, ha nem, úgy
csökkentett pontszámmal megismétlik a vizsgálatot. Ha már két egymás utáni
egyenes szakasz megfelelt a feltételeknek a program összehasonlítja
irányszögeiket s amennyiben eltérésük egy megadott küszöböt nem halad meg a két
egyenes szakaszt egybeolvasztja, azaz megszünteti az eredetileg az első szakasz
végére tervezett töréspontot. A folyamat csomóponttól csomópontig tart, az
eredmény pedig az ív megmaradt pontjainak koordináta jegyzéke.
Bár a pillanatnyi gyakorlat elsőbbséget biztosít a
raszter-vektor konverziónak a tudományos irodalomban mind több olyan
tanulmánnyal találkozunk, mely a hibrid rendszerek nagymértékű elterjedését prognosztizálja
a közeljövőben.
Ezek a rendszerek képesek mind a raszteres mind a vektoros
adatok fogadására s a különböző műveleteket mindig abban a formában végzik
amely a végrehajtás szempontjából előnyösebb. Az ilyen működési elv azonban
feltételezi a rendszeres kétirányú konverziót, ami megnövelte az érdeklődést az
egyszerűbbnek tűnő vektor-raszter átalakítás iránt is.
A téma első megjelenése annak köszönhető, hogy a
számítástechnikában a korai vektoros grafikus képernyők helyét elfoglalták a
raszteres grafikus eszközök. Az egyik megoldandó probléma tulajdonképpen az
volt, hogy a különböző matematikai görbéket milyen sűrű paraméter értékekkel
kell kiszámolni ahhoz, hogy a képernyőn a görbét reprezentáló pixelek,
függetlenül a görbe szakaszától, egyenlő távolságokra jelenjenek meg, s ennek
következtében a görbe rajzának egyenletes vonalvastagsága és tömöttsége legyen
az egész ábrázolási tartományban. A másik probléma, a kerekítési hibákból adódó
fogazottság, különösen a kis felbontású monitorokon rontotta az ábrázolás
minőségét.
A térinformatika szempontjából a vektor-raszter átalakítás
megoldandó kérdései kissé más aspektusból jelentkeznek. Bár igaz az, hogy mind
munka közben, mind az eredmény elkészülte után grafikus eszközöket is
alkalmazunk (képernyő, mátrixplotter) ezek vezérlése rendszerint a gyártók
által szállított meghajtókkal történik és nem hat vissza a térinformatikai
rendszer állományára. A rendszer állományában tárolt vektoros adatok
rendszerint nyílt vagy zárt sokszögek, melyeket legfeljebb a megjelenítés
szakaszában a rajzi fájlban simítanak valamilyen görbével. Számunkra tehát az a
lényeges, hogy az egyenes darabok egyértelműen és lehetőleg visszaállíthatóan
nyerjék el raszteres alakjukat.
Másik, speciálisan a térinformatikai rendszerek belső
működését érintő probléma a raszteres alrendszer felbontása. Bizonyos globális
vizsgálatokra a durva felbontás indokolt lehet, ugyanakkor nem akadályozhatja,
hogy finomabb vektoros struktúrák bedigitalizálása esetén azok raszterizált
formái a struktúrában megjelenhessenek (nem árt rámutatni, hogy hasonló
problémákkal találkozunk a hagyományos topográfiai térképeken is, ezek
megoldására találták ki a méreten felüli és az eltolt ábrázolást).
Térjünk vissza a vonaldarab raszterizálására. Állapodjunk meg
mindenek előtt abban, hogy a koordináta rendszer kezdőpontja a raszter mező bal
alsó sarokpontja. Ez a megállapodás nem fölösleges, mivel gyakran a bal alsó
pixel közepén veszik fel az origót. Ezután az egyenes egyenlete alapján a
független változó egész értékeire kiszámítjuk a függvény értékeket. Az
iránytangens egynél nagyobb értékeire a függő és független változó értékeit
felcseréljük.
|
|
2.36 ábra -
helyes és helytelen pixelkiválasztás
|
A
megkapott függvény értékek kerekítésénél úgy járunk el, hogy ha a vonal két
szomszédos cellát is érint csak azt feketítjük be amelyiken a hosszabb utat
teszi meg (ehhez meg kell vizsgálni a két egymás után következő y értéket és
amennyiben a cellahatár kerek értékétől ellenkező értelemben térnek el, úgy
az a cella változik feketévé, mely irányában a nagyobb eltérés jelentkezik).
|
|
A raszteres rendszerek előnyei a területekkel végzett
műveletekben fejeződnek ki a leginkább, ezért indokolt röviden kitérnünk a
vektor poligonok raszteres átalakítására. Az átalakítás alapelve a topológiai modellel kapcsolatban már ismertetett
paritás vizsgálat azaz a zárt idomoknak az a tulajdonsága hogy a belső
pontjaikból húzott félegyenesek az idom határvonalával páratlan számú pontban
metsződnek.
|
A számítástechnikai megvalósítás során a határoló egyenes
darabokat maximális y és minimális x koordinátájú
sarokpontjaikkal, valamint a másik végpontjukat meghatározó, Dx és Dy
koordináta növekményeikkel írjuk le. Ezután rendezzük az oldalakat olymódon,
hogy egymásutánjukat y értékük nagysága, iletve azonos y
esetén, Dx-ük kicsisége határozza meg. A 2.37 ábrán az oldalak, ezek
szerint, a következő sorrendben következnek: AB, AC, DC, DE, EF,... .
|
|
A raszter átalakítás fentről lefelé irányuló soronkénti
letapogatással történik. Tekintettel az y nagysága szerinti
rendezettségre a letapogatást elég ymax csonkolt értékénél
megkezdeni. A program meghatározza a vízszintes sor metszéspontjait a sorba állított
aktív egyenes szakaszokkal. A kapott metszéspontoknak megfelelő
oszlopkoordináták meghatározásához figyelembe kell venni a következő sorral
alkotott metszéspontot is a célból, hogy a határvonalon csak olyan pixelt
feketítsünk be melynek a vonal több mint ötven százalékát magába foglalja.
Az egy sorhoz tartozó raszterizált metszéspont koordinátákat listába
foglaljuk és megnézzük, hogy a vizsgált pixeltől balra (kisebb x vagy
oszlop koordinátával) hány metszéspont található. Ha ezek száma páratlan, úgy a
pixelt befeketítjük, ha páros nem. Az eljárást mindaddig folytatjuk, míg a sor
utolsó metszéspontjához nem érünk.
Ezután áttérünk a következő sor letapogatására. Az új sor y
koordinátáját összehasonlítjuk a már vizsgált oldalak legkisebb y
koordinátáival illetve a sorban következő oldal(ak) legnagyobb y koordinátá(i)val
és az összehasonlítás eredményeképpen változatlanul hagyjuk illetve módosítjuk
a metszéspontszámításnál figyelembe veendő oldalak listáját.
A vizsgálatot utoljára azzal a sorral
futtatjuk le melynek y koordinátája megegyezik a legalsó sarokpont csonkolt y
értékével.
Megjegyzéseit
E-mail-en várja a szerző: Dr Sárközy Ferenc