Dr. Sárközy Ferenc: Térinformatika
Ebben a részben megismerkedünk:
- A hierarchikus tárfelosztással,
- a címjegyzék (directory) orientált módszerekkel,
- az interpoláló hashing módszerrel,
- vonalas és területi vektor struktúrák tárolásával.
A vektoros adatmodellek nélkülözhetetlen alapelemei a pont
koordináták. A pont koordináták a térbeliség legegyszerűbb vektoros kifejezői
(gondoljunk pld. a geokódra), ugyanakkor a pontszerű objektumok viszonylagos
egyszerűsége szemléletesebbé teheti a tárgyalásunkat. Foglalkozzunk tehát előbb
a pontszerű objektumok tárolásával s ezek után próbáljuk meg eredményeinket
vonalas és területi objektumokra általánosítani.
Ha a hagyományos adatszervezés eszközeivel a térbeliségtől
eltekintve kísérelnénk meg a pontok tárolását, úgy a szekvenciális tárolás
elveit figyelembe véve, növekvő pontszámok esetleg növekvő x vagy y koordináták
szerint rendezhetnénk az adatokat. Nem igényel különösebb magyarázatot, hogy az
ilyen rendezés a térbeli visszakereséseket kevéssé támogatná, a
térinformatikában pedig erre van szükségünk, ezért más utat kell járnunk.
A legegyszerűbb megoldás az lehet, ha a számítógép memória területét
képzeletben egy koordináta hálózattal borítjuk be és a pontkoordinátákat a
nekik megfelelő tároló helyekre képezzük le (például az indirekt címzés
felhasználásával).
|
|
A
koordináta intervallumokat realizáló négyzetháló különösen akkor előnyös, ha
fizikailag is egy olyan lemez-blokkal azonosítható, melyet az olvasófej egy
hozzáféréssel kiolvas. Az ilyen lemezterületeket a számítástudományban lapnak
(page) nevezik. A fentiekben definiált kereső négyzetháló nagymértékben
megkönnyíti hogy a szomszédos objektumok gyorsan elérhetők legyenek és
módosításaik is csak helyi változásokat okozzanak a tárban. Az ábra tanúsága
szerint a légelőnytelenebb esetben is csak négy hozzáférés szükséges egy négy
szomszédos lapra kiterjedő pont együttes aktivizálásához.
|
2.21 ábra -
koordináta intervallumokat realizáló négyzetháló
|
|
Vázolt koncepciónkban hallgatólagosan feltételeztük, hogy a
keresőháló alapnégyzetének megfelelő tárrész (lap) konstans
mennyiségű adat tárolására alkalmas. A geodéziai gyakorlat azonban arról tanúskodik,
hogy a bizonyos tematikát leíró pontok sűrűsége általában nem állandó.
Gondoljunk csak a földmérési alaptérképek külterületi és belterületi szelvényei
közötti lényeges pontsűrűség különbségre. Ha tehát egyenlőtlen pontsűrűség
esetén egyenletes keresőhálót alkalmazunk, úgy vagy a lapok egyrésze még
lényegében üres amikorra más lapok már lényegében beteltek, vagy ha nem akarunk
üres lapokkal dolgozni, úgy a nagyobb pontsűrűségű helyeken, a hamar betelt
lapokra eső fennmaradó adatokat csak a túlcsordulási területen tudjuk tárolni,
ami lényegében megnehezíti a hely szerinti visszakeresést.
A vázolt problémákat dinamikus
társzervezéssel küzdhetjük le.
A dinamikus társzervezés abból indul ki, hogy egy tárrész
(lap) konstans adatmennyiséget kell, hogy tároljon. Ez a követelmény
viszont azzal a következménnyel jár, hogy a tárrészek különböző méretű
területre eső pontokat tartalmaznak, azaz a keresőháló egyenletes beosztásából
származó előnyöket elveszítjük.
Amint az egy lapra eső pontmennyiség elérte a határértéket,
úgy a lap által reprezentált terület valamilyen szabály szerint felosztódik. Az
osztódást fa alakú gráfokkal ábrázolhatjuk. A leggyakrabban alkalmazott
negyedelést a négyágú fával quadtree-vel képezzük
le.
Másik lehetőség a lapok felezéséből áll. Az úgy
nevezett KD-fákkal leírható módszer alkalmazása esetén a kezdetben
négyzet alakú területet váltakozva hossz illetve kereszt irányban osztjuk fel.
Mivel a raszteres adatmodellben a fa struktúrák széleskörű
alkalmazásra kerülnek az ott kidolgozott algoritmusok az adott területre eső
pontokat tartalmazó lapok keresésére is jól használhatók. A fa struktúrákban
való keresés során egyszerűen találhatók meg a szomszédos területeket leképező
lapok is, amire a 2.21 ábra tanulsága szerint gyakran szükségünk lehet.
A lapok illetve a bennük tárolt pontkoordináták a
lemezegységen helyezkednek el. A lapok keresését lehetővé tevő fák leírása
(pointeres vagy lineáris reprezentációja) azonban kis adatmennyiség esetén
célszerűen a központi tárba kerül s ezzel a keresés jelentősen meggyorsítható.
Más a helyzet, ha olyan nagy adatmennyiséget kell tárolnunk, hogy a lapokat
leíró fa nem fér el a központi tárban. Ebben az esetben a lemezhozzáférések
minimalizálását két alapmódszer különböző variánsainak alkalmazásával érhetjük
el. Ezek a címjegyzék orientált módszerek illetve a
címjegyzék nélküli hashing eljárások
.
Képzeljük el, hogy a pontokat ábrázoló területet egy olyan
mátrixba képezzük le mely sorainak száma megegyezik a terület keresztirányú
felbontásából származó legkisebb sávok számával, oszlopainak száma pedig a
terület hosszirányú osztásából keletkező osztásközök számával. A mátrix elemei
legyenek a kérdéses lapok címei. Helyezzük el ezt a mátrix alakú címjegyzéket a
központi tárban. A koordináták alapján történő keresést ezután úgy végezhetjük,
hogy kiszámítjuk a kérdéses mátrix elem indexét a keresett pont koordinátáiból,
majd kiolvassuk a lemezegységről annak a lapnak a tartalmát, melynek címe a
kérdéses mátrix elem. A lapon belüli keresés a lap szervezésétől függő keresési
módszerrel hajthatjuk végre.
A fenti elvek alapján működő EXCELL módszer
jobb megértéséhez tekintsük a 2.22 ábrát.
|
|
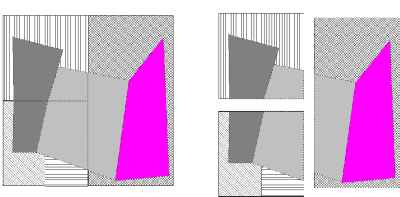
2.22 ábra - a
háttér tár leképezése a címjegyzékben (EXCELL módszer)
|
|
|
Az
ábra baloldali része azt ábrázolja, hogy a figyelembe vett területre
(esetünkben lx = 1000 m. és ly = 1000 m.) eső pontok
tárolása melyik lapon valósul meg, azaz a baloldali ábráról leolvasható, hogy
milyen koordináták tartoznak tárolás szempontjából egy laphoz. A jobboldali
ábra az előbbi lapokkal felosztott terület címjegyzékbe (helyesebben
címmátrixba) történő leképezése. Minden tárolt pont hozzákapcsolható a
címmátrix valamely eleméhez, mely megmondja, hogy a kérdéses pont milyen cím
alatt tárolt lapon található meg. A kapcsolatot a tárolt pont és a mátrix
elem között ez utóbbi indexei teremtik meg, melyek a pont koordinátáiból
számíthatók a baloldali képletek szerint.
|
A tárolási lapokra osztott területet az EXCELL módszertől
kissé eltérően képezi le a címjegyzékbe a GRID FILE módszer.
Amíg az előbbi a terület legkisebb osztásának megfelelő
beosztással végig osztotta a címjegyzéket, addig a GRID FILE módszer esetén a
leképezésre a következő szabályok fogalmazhatók meg:
- átmásoljuk a
területi beosztást a directoryba;
- kihosszabbítjuk
a már megkezdett, de a területen végig nem húzott osztásvonalakat a
címjegyzék széléig (2.23 ábra).
|
|
2.23 ábra - a
háttér tár leképezése a címjegyzékben (GRID FILE módszer)
|
Ezek birtokában az indexek
kiszámítása már egyszerű feladat, csak azt kell meghatározni, hogy a kérdéses
pont x illetve y koordinátája hányadik intervallumba kerül.
Az intervallumok sorszáma
szolgáltatja a címmátrix elem sor illetve oszlopindexét.
Megjegyezzük,
hogy a szemléletesség kedvéért a címmátrix sorindexeit a matematikában
megszokott jelölésmódtól eltérően alulról felfelé növekvő rendben ábrázoltuk,
szükség esetén a sorrend megváltoztatása minden nehézség nélkül elvégezhető.
|
A vázolt leképezési mód
azt eredményezi, hogy a címmátrix elemek indexei nem számolhatók közvetlenül
a koordinátákból. Az indexek meghatározásához még két intervallum vektort is
tárolni kell.
|
A fenti címtár orientált dynamikus módszerek lényegében az úgy
nevezett hashing módszer (hash=aprít) továbbfejlesztésének
egyféle variánsai. A hashing módszer egy olyan szabványos keresési-tárolási
eljárás, mely előre definiált keresési argumentum(ok) alapján történő tárolást
és keresést szolgál, s egyben direkt tárelérést biztosit. A hagyományos hashing
azonban statikus címjegyzékkel dolgozott, ami megkövetelte, hogy az egy
hozzáféréssel kiolvasható adatok mennyiségét előre megbecsüljék, a rossz
becslés vagy az esetleges törlések az egész tárelrendezés átszervezését vonták
maguk után.
A dynamikus tárfelosztás igényei maguk után vonták a hashing
technikák továbbfejlődését is. Ezek között találunk címjegyzéket használó
és címjegyzék nélküli módszereket. Az előbbiek közé tartozik a virtuális
hashing , a dynamikus hashing és a kiterjeszthető hashing .
Az utóbbiak közül a lineáris hashingra és az interpoláción
alapuló indexkezelésre röviden kitérünk.
A címjegyzéket használó dynamikus hashing
módszerek nagyon sok hasonlóságot mutatnak az EXCELL és GRID FILE módszerekkel.
E módszerekben két koordináta képezte a keresési argumentumot. Általánosan az
ilyen módszereket kétdimenziós hashingnak nevezhetjük. Lehetőségünk van azonban
a keresési-tárolási attribútumok dimenziójának emelésére is s így eljuthatunk a
háromdimenziós hashinghoz (ennél magasabb dimenziót csak ritkán alkalmaznak).
|
|
2.24 ábra -
háromdimenziós hashing geometriai szemléltetése
|
Ezek után
nem nehéz kikövetkeztetni, hogy az adott pontszámú és adott koordináta mezőbe
eső pontokat tartalmazó lapok címeit a lemez és a hasáb közös kockametszete
szolgáltatja.
|
A 2.24 ábrán a címjegyzéket egy
kockával szimbolizáltuk, mely bal alsó sarkából kiinduló derékszögű
koordinátarendszer vízszintes tengelyei az x és y koordináták szerinti, míg
függőleges tengelye a pontszámok szerinti keresési argumentumot reprezentálja
[6].
Ha
egy adott sarokponti koordinátákkal jellemzett ablakba eső pontok
koordinátáit és pontszámait keressük, úgy azokat a lapokat kell kiolvasni a
lemezről, melyek címeit az ablakra állított hasáb által a kockából kimetszett
mátrix elemek tartalmaznak.
Ha egy szűk
pontszámtartományba eső pontok koordinátáira vagyunk kíváncsiak, úgy az
ezekre illeszkedő lemezzel metszve a kockát nyerjük azokat a mátrix elemeket,
melyek megadják a kiolvasandó lapok számait.
|
Az interpoláló hashing módszer a lineáris hashing egy
többdimenziós változata.
Maga a lineáris hashing azért figyelemre méltó módszer,
mivel kifejezett címtár nélkül is jó teljesítményt biztosít. A módszer főbb
előnyeit úgy foglalhatjuk össze, hogy
- a file
növekedés és csökkenés feltételeit elegánsan biztosítja;
- nincs
szüksége címjegyzék tárolására;
- a kijelölt
tároló hely hasznosítása szabályozott.
Az előző pontokban a dinamikus lapkezelés tárgyalásakor abból
a kézenfekvőnek tekinthető elgondolásból indultunk ki, hogy állományunk új
pontrekordokkal történő bővítésekor (melyek kulcsai a koordinátákból vezethetők
le) abban az esetben, ha az új rekordok beszúrása túlcsordulást idézne elő azt
a lapot vágjuk ketté, melyre eső címlánc bővitése a túlcsordulást kiváltja. Ez
a természetes módszer azonban csak akkor alkalmazható, ha címjegyzéket is vezetünk
és tárolunk hisz a szétbontandó lapok véletlenszerűen fordulnak elő.
A címjegyzék vezetését akkor kerülhetjük el, ha a lapok
felbontását szabályosan végezzük.
A lineáris hashing ezt az elvet követi mégpedig a
következőképpen. Ha N számú lapunk van úgy először az 1-es lapot bontja fel 1
és N+1 lapokra majd a 2-es lapot 2 és N+2-re stb. amíg az N.-ik lapot fel nem
bontja N-re és 2N-re. Ezután újra az 1-es lap kerül felbontásra 1-re és 2N+1-re
s a felbontás így folytatódik mindaddig, míg ezt az új adatok fellépése
szükségessé teszi.
Azt az ellentmondást, hogy az új lapok nem feltétlenül ott
(azoknál a címláncoknál) keletkeznek, ahol éppen szükség volna rájuk úgy oldja
fel a módszer, hogy a telítődött de még fel nem osztott lapokról túlcsorduló
címekhez tartozó információt ideiglenes túlcsordulási területen tárolja
mindaddig míg a szabályos osztódási mechanizmus az információ címeihez kijelölt
lapot létre nem hozza. Ez azt jelenti, hogy az ellentmondás mentes
állapot bizonyos késleltetéssel jön létre.
A módszerrel eredményesen oldhatók meg a rekordok beszúrásai
és törlései. Beszúrás esetén a kereső algoritmus először megkeresi hogy a
rekord címe melyik lap címláncába esik. Ha ilyen cím nincs még a láncban úgy
megtörténik a beszúrás és a feltöltési mérőszám aktualizálása. Ha e mérőszám
meghaladja a fölső határát megtörténik a lánc szétvágása. A törlés hasonlóan
történik. A különbség csak abból áll, hogy itt a feltöltési mérőszám alsó határ
alá csökkenése vált ki reakciót, mégpedig a két szomszédos címlánc összevonását.
Míg a lineáris hashing egydimenziós
keresési-tárolási eljárás, addig az interpoláló hashing továbbfejleszti ezt a
módszert k dimenziós keresésre-tárolásra azaz azokra a feladatokra, melyekkel
címjegyzék orientált módszerekkel kapcsolatban már megismerkedtünk.
Az interpoláló hashing az EXCELL
módszerhez hasonlóan minden lap címláncához egy keresési hálószemet (cellát)
kapcsol. Ezt a módszer úgy realizálja, hogy módosítja a lineáris hashing
lapbontási feltételeit. Ennek az a lényege, hogy a lap felbontásakor
kettéosztja a lapra eső címláncot (azaz nem csak a túlcsorduló címek mennek át
az új lapra), az eredeti lapon a kisebb címekből álló lánc marad, míg a nagyobb
címekből álló lánc az új lapra kerül.
A másik sajátosság a kulcsok kialakításában van. Mivel a
kulcsoknak k dimenziós keresési kritériumokat kell kielégítenie, a módszer
veszi az objektum k tengely szerinti koordinátáit és egymásba tolja azokat, más
szóval veszi a k darab koordináta bináris alakját és helyértékenként egymásután
irja őket. A módosított lapmegosztás illetve a keresési kulcs ismertetett
kialakítása azt eredményezi, hogy az interpoláló hashing az objektum tér
ugyanolyan felosztását eredményezi mint az EXCELL módszer. A kölönbség
mindössze annyi, hogy a keresési háló és a címláncok közötti kapcsolatot nem
címjegyzék, hanem képlet szolgáltatja. További különbség, hogy a
címláncok és a keresési háló között 1:1 viszony áll fent míg az EXCELL módszer
esetén ez a viszony 1:sok (a címjegyzékben azonos mátrix elemek szerepelnek),
továbbá az interpoláló hashing esetén a keresőháló legalább két különböző
méretű elemből áll, s végül az EXCELL módszerben a kereső hálóelemek száma mindig
duplázódik, míg az interpoláló hashing esetén csak eggyel nő.
Több lehetőség is rendelkezésünkre áll amikor az eddig
tárgyalt pontszerű objektumok helyett vonalas vagy területi objektumok
tárolásának megoldására térünk át.
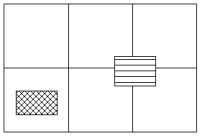
Ha a tárolás térbeliségét továbbra is szigorúan meg kívánjuk
őrizni úgy az egyes objektumokat általában különböző lapokon kell tárolni (2.25
ábra).
|
|
2.25 ábra -
szigorú lapstruktúra, objektumok szétdarabolása
|
Ebben az esetben a különböző lapokra eső csatlakozó pontokat
külön jelölni kell. A módszer akkor előnyös, ha az adatbázis többé kevésbé
statikus és nem igényli a kapcsolópontok módosítását. Szigetekkel tűzdelt
területi objektumoknál a módszer alkalmazása esetén problémák léphetnek fel.
Az objektum orientált programozás igényeit jobban
kielégíti az a tárolási mód, amikor a geometrizált lapfelosztást csak az
objektumok súlypontjaira érvényesítjük, más szóval, ha az
objektumokat azon a lapon tároljuk ahová súlypontjuk esik.
Ebben az esetben a súlypontok vonatkozásában mindaz érvényes
amit a pontok tárolásával kapcsolatban elmondtunk. Nem szabad azonban
elfelejtenünk, hogy az objektum részletpontjait nem feltétlenül azon a lapon
találjuk, amely a koordinátáikból levezethető keresési kulcsból adódik, ezért a
részletpontokhoz csak az objektumon keresztül juthatunk el.
Szintén a lapokra történő direkt geometriai leképezést
torzítja az átfedő lapok alkalmazása. A legnagyobb tárolandó objektum mérete
ismeretében megállapítható az az átfedés, mely valamennyi objektum egy egy
lapon történő szakadás mentes tárolását biztosíthatja. Az átfedés azonban azt
jelenti, hogy ugyanannak a geometriai tartalomnak (koordináta párnak) több ,
maximum négy lap is helyet adhat, következésképpen a részletpontok tárolásakor
és visszakeresésekor a koordináták mellett az objektumhoz tartozást is
figyelembe kell venni a kulcsok kialakításakor.
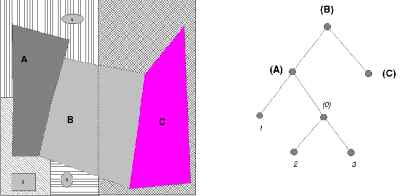
Igen érdekes, és bizonyos szempontból előremutató a
lapfelosztás fa struktúrája közbenső csomópontjainak
figyelembevétele az objektumok tárolására. Amint arról már szóltunk, a fa
struktúra úgy alakul ki, hogy a figyelembe veendő területet a tárolandó pontok
mennyisége függvényében váltakozva hosszában illetve keresztben felosztjuk és
az így kapott területrészekhez egy egy lapot rendelünk.
Ebben a rendszerben csak a fa levelei (azon csomópontok,
melyek tovább nem ágaznak) képviselnek egy egy lapot, a közbenső csomópontok
csak azt mutatják meg, hogy a levelek az eredeti terület mely részének hányszoros
felosztásához tartoznak. Ha azonban a közbenső csomópontokat is tárolási
funkcióval látjuk el úgy hozzájuk is kell rendelni egy egy lapot, ami a
gyakorlatban azt jelenti, hogy ugyanaz a terület több lapra is le van képezve.
A 2.26 ábra példáján a (B)-el jelölt gyökér csomóponthoz rendelünk egy lapot
(erre tulajdonképpen az egész ábrázolt terület van leképezve), az (A)-al jelölt
csomóponthoz, mely a terület bal felét képezi le szintén rendelünk egy lapot,
hasonlóképpen a terület jobb felét reprezentáló (C)-el jelölt levélhez. Ezen
kívül az 1, 2, 3 jelű levelekhez is tartozik egy egy lap. Az (0)-al jelölt
csomópont csak elágazási funkciót végez, tehát nem tartozik hozzá lap.
A kérdés most már az, hogy az azonos területeket leképező
lapokon hogyan osztjuk el a területre eső objektumok tárolását. Mivel a fa
minden hierarchia szintje egy területnagyságot reprezentál (a gyökér színt az
egész területet, a következő színt a terület felét stb.) kézenfekvő, hogy a
közbenső csomópontokat az objektumok területnagyság szerinti tárolására
használjuk fel. A 2.26 ábra példája esetében a B objektum, mely nagyobb a
terület felénél, csak az egész területet leképező lapon azaz a gyökérben
kerülhet tárolásra, míg a terület negyedét meghaladó A és C objektumok a fél
területeket leképező következő szinten. Hasonló módon objektum méret szerint
rendelhetünk területeket az alacsonyabb csomóponti illetve levél szintekhez.
E tárolási módszer különösen előnyös a többméretarányú
(multiscale) térbeli adatbázisok létrehozásában, mivel egyszerű módszereket
biztosít a méretarány csökkenésével felmerülő generalizálási feladatok részbeni
megoldásához. Ha ugyanis egy bizonyos méretnél kisebb objektumokat nem kívánunk
ábrázolni, úgy a visszakeresésnél csak az alacsonyabb hierarchia szintekig
járjuk be a fát. Természetesen a nagyobb méretű objektumok is rendelkezhetnek
olyan részletekkel, melyeket az adott méretarányú ábrázolás már nem képes
kifejezni. E részletek kiküszöbölésére az utóbbi időben jól működő automatizált
generalizáló algoritmusokat dolgoztak ki.
Megjegyzéseit
E-mail-en várja a szerző: Dr Sárközy Ferenc